Types of Capacitor
There are a very, very large variety of different types of capacitor available in
the market place and each one has its own set of characteristics and applications, from very small delicate trimming
capacitors up to large power metal-can type capacitors used in high voltage power correction and smoothing circuits.
The comparisons between the the different types of capacitor is generally made with regards to the dielectric
used between the plates. Like resistors, there are also variable types of capacitors which allow us to vary their
capacitance value for use in radio or "frequency tuning" type circuits.
Commercial types of capacitor are made from metallic foil interlaced with thin sheets of
either paraffin-impregnated paper or Mylar as the dielectric material. Some capacitors look like tubes, this is
because the metal foil plates are rolled up into a cylinder to form a small package with the insulating dielectric
material sandwiched in between them. Small capacitors are often constructed from ceramic materials and then dipped
into an epoxy resin to seal them. Either way, capacitors play an important part in electronic circuits so here are
a few of the more "common" types of capacitor available.
Dielectric Capacitor
Dielectric Capacitors are usually of the variable type were a continuous
variation of capacitance is required for tuning transmitters, receivers and transistor radios. Variable dielectric
capacitors are multi-plate air-spaced types that have a set of fixed plates (the stator vanes) and a set of movable
plates (the rotor vanes) which move in between the fixed plates. The position of the moving plates with respect to
the fixed plates determines the overall capacitance value. The capacitance is generally at maximum when the two sets
of plates are fully meshed together. High voltage type tuning capacitors have relatively large spacings or air-gaps
between the plates with breakdown voltages reaching many thousands of volts.
Variable Capacitor Symbols

As well as the continuously variable types, preset type variable capacitors are also available
called Trimmers. These are generally small devices that can be adjusted or "pre-set" to a particular capacitance
value with the aid of a small screwdriver and are available in very small capacitances of 500pF or less and are non-polarized.
Film Capacitor
Film Capacitors are the most commonly available of all types of capacitors,
consisting of a relatively large family of capacitors with the difference being in their dielectric properties.
These include polyester (Mylar), polystyrene, polypropylene, polycarbonate, metallised paper, Teflon etc. Film
type capacitors are available in capacitance ranges from as small as 5pF to as large as 100uF depending
upon the actual type of capacitor and its voltage rating. Film capacitors also come in an assortment of shapes
and case styles which include:
- Wrap & Fill (Oval & Round) - where the capacitor is wrapped in a tight plastic tape and have the ends filled with epoxy to seal them.
- Epoxy Case (Rectangular & Round) - where the capacitor is encased in a moulded plastic shell which is then filled with epoxy.
- Metal Hermetically Sealed (Rectangular & Round) - where the capacitor is encased in a metal tube or can and again sealed with epoxy.
with all the above case styles available in both Axial and Radial Leads.
Film Capacitors which use polystyrene, polycarbonate or Teflon as their dielectrics
are sometimes called "Plastic capacitors". The construction of plastic film capacitors is similar to that for paper film
capacitors but use a plastic film instead of paper. The main advantage of plastic film capacitors compared to
impregnated-paper types is that they operate well under conditions of high temperature, have smaller tolerances, a
very long service life and high reliability. Examples of film capacitors are the rectangular metallised film and
cylindrical film & foil types as shown below.
Radial Lead Type

Axial Lead Type

The film and foil types of capacitors are made from long thin strips of thin metal foil with the dielectric material sandwiched together which are wound into a tight roll and then sealed in paper or metal tubes.

Film Capacitor
These film types require a much thicker dielectric film to reduce the risk of tears or punctures in
the film, and is therefore more suited to lower capacitance values and larger case sizes.
Metallised foil capacitors have the conductive film metallised sprayed directly onto each side of
the dielectric which gives the capacitor self-healing properties and can therefore use much thinner dielectric films.
This allows for higher capacitance values and smaller case sizes for a given capacitance. Film and foil capacitors
are generally used for higher power and more precise applications.
Ceramic Capacitors
Ceramic Capacitors or Disc Capacitors as they are generally called,
are made by coating two sides of a small porcelain or ceramic disc with silver and are then stacked together to make a
capacitor. For very low capacitance values a single ceramic disc of about 3-6mm is used. Ceramic capacitors have a high
dielectric constant (High-K) and are available so that relatively high capacitances can be obtained in a small physical
size.

Ceramic Capacitor
They exhibit large non-linear changes in capacitance against temperature and as a result are used as de-coupling
or by-pass capacitors as they are also non-polarized devices. Ceramic capacitors have values ranging from a few picofarads
to one or two microfarads but their voltage ratings are generally quite low.
Ceramic types of capacitors generally have a 3-digit code printed onto their body to identify their
capacitance value in pico-farads. Generally the first two digits indicate the capacitors value and the third digit
indicates the number of zero's to be added. For example, a ceramic disc capacitor with the markings 103
would indicate 10 and 3 zero's in pico-farads which is equivalent to 10,000 pF or
10nF.
Likewise, the digits 104 would indicate 10 and 4 zero's in pico-farads
which is equivalent to 100,000 pF or 100nF and so on. Then on
the image of a ceramic capacitor above the numbers 154 indicate 15 and 4 zero's in pico-farads
which is equivalent to 150,000 pF or 150nF. Letter codes are sometimes
used to indicate their tolerance value such as: J = 5%, K = 10%
or M = 20% etc.
Electrolytic Capacitors
Electrolytic Capacitors are generally used when very large capacitance values are
required. Here instead of using a very thin metallic film layer for one of the electrodes, a semi-liquid electrolyte
solution in the form of a jelly or paste is used which serves as the second electrode (usually the cathode). The
dielectric is a very thin layer of oxide which is grown electro-chemically in production with the thickness of the
film being less than ten microns. This insulating layer is so thin that it is possible to make capacitors with a
large value of capacitance for a small physical size as the distance between the plates, d
is very small.

Electrolytic Capacitor
The majority of electrolytic types of capacitors are Polarised, that is the DC voltage applied
to the capacitor terminals must be of the correct polarity, i.e. positive to the positive terminal and negative to
the negative terminal as an incorrect polarisation will break down the insulating oxide layer and permanent damage
may result. All polarised electrolytic capacitors have their polarity clearly marked with a negative sign to indicate
the negative terminal and this polarity must be followed.
Electrolytic Capacitors are generally used in DC power supply circuits due to
their large capacitances and small size to help reduce the ripple voltage or for coupling and decoupling applications.
One main disadvantage of electrolytic capacitors is their relatively low voltage rating and due to the polarisation
of electrolytic capacitors, it follows then that they must not be used on AC supplies. Electrolytic's generally come
in two basic forms; Aluminum Electrolytic Capacitors and Tantalum Electrolytic Capacitors.
Electrolytic Capacitor
 |
1. Aluminium Electrolytic Capacitors
There are basically two types of Aluminium Electrolytic Capacitor, the plain foil
type and the etched foil type. The thickness of the aluminium oxide film and high breakdown voltage give these capacitors
very high capacitance values for their size. The foil plates of the capacitor are anodized with a DC current. This
anodizing process sets up the polarity of the plate material and determines which side of the plate is positive and
which side is negative.
The etched foil type differs from the plain foil type in that the aluminium oxide on the anode and
cathode foils has been chemically etched to increase its surface area and permittivity. This gives a smaller sized capacitor
than a plain foil type of equivalent value but has the disadvantage of not being able to withstand high DC currents compared
to the plain type. Also their tolerance range is quite large at up to 20%. Typical values of capacitance for an aluminium
electrolytic capacitor range from 1uF up to 47,000uF.
Etched foil electrolytic's are best used in coupling, DC blocking and by-pass circuits while plain
foil types are better suited as smoothing capacitors in power supplies. But aluminium electrolytic's are "polarised"
devices so reversing the applied voltage on the leads will cause the insulating layer within the capacitor to become
destroyed along with the capacitor. However, the electrolyte used within the capacitor helps heal a damaged plate if
the damage is small.
Since the electrolyte has the properties to self-heal a damaged plate, it also has the ability
to re-anodize the foil plate. As the anodizing process can be reversed, the electrolyte has the ability to remove the
oxide coating from the foil as would happen if the capacitor was connected with a reverse polarity. Since the electrolyte
has the ability to conduct electricity, if the aluminum oxide layer was removed or destroyed, the capacitor would allow
current to pass from one plate to the other destroying the capacitor, "so be aware".
2. Tantalum Electrolytic Capacitors
Tantalum Electrolytic Capacitors and Tantalum Beads, are available
in both wet (foil) and dry (solid) electrolytic types with the dry or solid tantalum being the most common. Solid tantalum
capacitors use manganese dioxide as their second terminal and are physically smaller than the equivalent aluminium capacitors.
The dielectric properties of tantalum oxide is also much better than those of aluminium oxide giving a lower leakage
currents and better capacitance stability which makes them suitable for use in blocking, by-passing, decoupling, filtering
and timing applications.
Also, Tantalum Capacitors although polarised, can tolerate being connected to a
reverse voltage much more easily than the aluminium types but are rated at much lower working voltages. Solid tantalum
capacitors are usually used in circuits where the AC voltage is small compared to the DC voltage. However, some tantalum
capacitor types contain two capacitors in-one, connected negative-to-negative to form a "non-polarised" capacitor for
use in low voltage AC circuits as a non-polarised device. Generally, the positive lead is identified on the capacitor
body by a polarity mark, with the body of a tantalum bead capacitor being an oval geometrical shape. Typical values
of capacitance range from 47nF to 470uF.
Aluminium & Tantalum Electrolytic Capacitor
 |
Electrolytic's are widely used capacitors due to their low cost and small size but there are
three easy ways to destroy an electrolytic capacitor:
- Over-voltage - excessive voltage will cause current to leak through the dielectric resulting in a short circuit condition.
- Reversed Polarity - reverse voltage will cause self-destruction of the oxide layer and failure.
- Over Temperature - excessive heat dries out the electrolytic and shortens the life of an electrolytic capacitor.
In the next tutorial about Capacitors, we will look at some of the main
characteristics to show that there is more to the Capacitor than just voltage and capacitance.






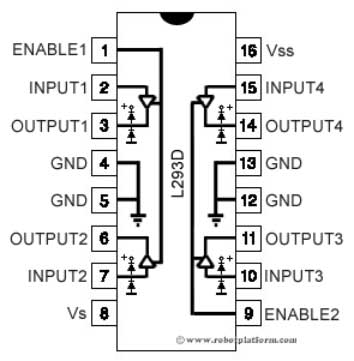
 Since
motors require more current then the microcontroller pin can typically
generate, you need some type of a switch (Transistors, MOSFET, Relay
etc.,) which can accept a small current, amplify it and generate a
larger current, which further drives a motor. This entire process is
done by what is known as a motor driver.
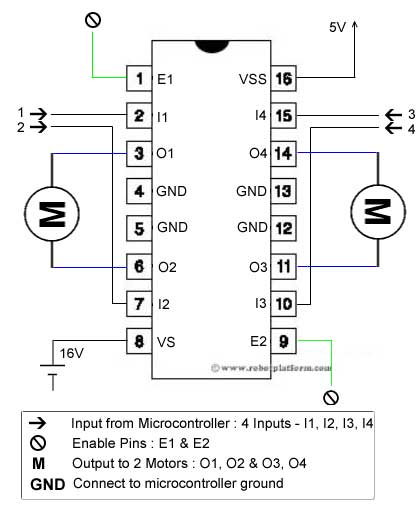
Since
motors require more current then the microcontroller pin can typically
generate, you need some type of a switch (Transistors, MOSFET, Relay
etc.,) which can accept a small current, amplify it and generate a
larger current, which further drives a motor. This entire process is
done by what is known as a motor driver.