
Dual H-bridge Motor Driver - L293D IC
Motor Driver and H-bridge basics
Generally, even the simplest robot requires a motor to rotate a wheel or performs particular action. Since
motors require more current then the microcontroller pin can typically
generate, you need some type of a switch (Transistors, MOSFET, Relay
etc.,) which can accept a small current, amplify it and generate a
larger current, which further drives a motor. This entire process is
done by what is known as a motor driver.
Since
motors require more current then the microcontroller pin can typically
generate, you need some type of a switch (Transistors, MOSFET, Relay
etc.,) which can accept a small current, amplify it and generate a
larger current, which further drives a motor. This entire process is
done by what is known as a motor driver. Motor driver is basically a current amplifier which takes a low-current signal from the microcontroller and gives out a proportionally higher current signal which can control and drive a motor. In most cases, a transistor can act as a switch and perform this task which drives the motor in a single direction.
Turning a motor ON and OFF requires only one switch to control a single motor in a single direction. What if you want your motor to reverse its direction? The simple answer is to reverse its polarity. This can be achieved by using four switches that are arranged in an intelligent manner such that the circuit not only drives the motor, but also controls its direction. Out of many, one of the most common and clever design is a H-bridge circuit where transistors are arranged in a shape that resembles the English alphabet "H".

As you can see in the image, the circuit has four switches A, B, C and D. Turning these switches ON and OFF can drive a motor in different ways.
- Turning on Switches A and D makes the motor rotate clockwise
- Turning on Switches B and C makes the motor rotate anti-clockwise
- Turning on Switches A and B will stop the motor (Brakes)
- Turning off all the switches gives the motor a free wheel drive
- Lastly turning on A & C at the same time or B & D at the same time shorts your entire circuit. So, do not attempt this.
Introduction to L293D IC
L293D IC generally comes as a standard 16-pin DIP (dual-in line
package). This motor driver IC can simultaneously control two small
motors in either direction; forward and reverse with just 4
microcontroller pins (if you do not use enable pins). Some of the
features (and drawbacks) of this IC are: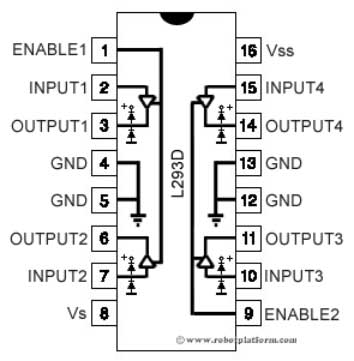
- Output current capability is limited to 600mA per channel with peak output current limited to 1.2A (non-repetitive). This means you cannot drive bigger motors with this IC. However, most small motors used in hobby robotics should work. If you are unsure whether the IC can handle a particular motor, connect the IC to its circuit and run the motor with your finger on the IC. If it gets really hot, then beware... Also note the words "non-repetitive"; if the current output repeatedly reaches 1.2A, it might destroy the drive transistors.
- Supply voltage can be as large as 36 Volts. This means you do not have to worry much about voltage regulation.
- L293D has an enable facility which helps you enable the IC output pins. If an enable pin is set to logic high, then state of the inputs match the state of the outputs. If you pull this low, then the outputs will be turned off regardless of the input states
- The datasheet also mentions an "over temperature protection" built into the IC. This means an internal sensor senses its internal temperature and stops driving the motors if the temperature crosses a set point
- Another major feature of L293D is its internal clamp diodes. This flyback diode helps protect the driver IC from voltage spikes that occur when the motor coil is turned on and off (mostly when turned off)
- The logical low in the IC is set to 1.5V. This means the pin is set high only if the voltage across the pin crosses 1.5V which makes it suitable for use in high frequency applications like switching applications (upto 5KHz)
- Lastly, this integrated circuit not only drives DC motors, but can also be used to drive relay solenoids, stepper motors etc.
L293D Connections
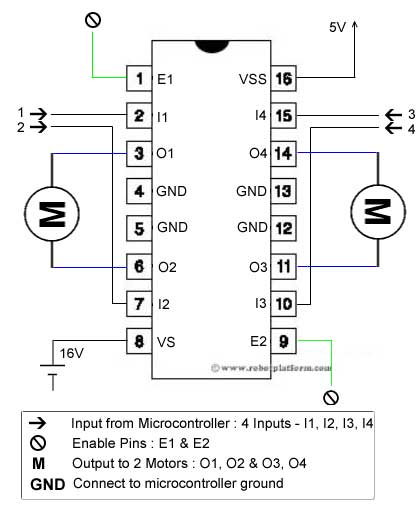
The circuit shown to the right is the most basic implementation of L293D IC. There are 16 pins sticking out of this IC and we have to understand the functionality of each pin before implementing this in a circuit- Pin1 and Pin9 are "Enable" pins. They should be connected to +5V for the drivers to function. If they pulled low (GND), then the outputs will be turned off regardless of the input states, stopping the motors. If you have two spare pins in your microcontroller, connect these pins to the microcontroller, or just connect them to regulated positive 5 Volts.
- Pin4, Pin5, Pin12 and Pin13 are ground pins which should ideally be connected to microcontroller's ground.
- Pin2, Pin7, Pin10 and Pin15 are logic input pins. These are control pins which should be connected to microcontroller pins. Pin2 and Pin7 control the first motor (left); Pin10 and Pin15 control the second motor(right).
- Pin3, Pin6, Pin11, and Pin14 are output pins. Tie Pin3 and Pin6 to the first motor, Pin11 and Pin14 to second motor
- Pin16 powers the IC and it should be connected to regulated +5Volts
Pin8 powers the two motors and should be connected to positive lead of a secondary battery. As per the datasheet, supply voltage can be as high as 36 Volts.
Truth table
I have shown you where to connect the motors, battery and the microcontroller. But how do we control the direction of these motors? Let us take an example:Suppose you need to control the left motor which is connected to Pin3 (O1) and Pin6 (O2). As mentioned above, we require three pins to control this motor - Pin1 (E1), Pin2 (I1) and Pin7 (I2). Here is the truth table representing the functionality of this motor driver.
| Pin 1 | Pin 2 | Pin 7 | Function |
| High | High | Low | Turn Anti-clockwise (Reverse) |
| High | Low | High | Turn clockwise (Forward) |
| High | High | High | Stop |
| High | Low | Low | Stop |
| Low | X | X | Stop |
- High ~+5V, Low ~0V,
- X=Either high or low (don't care)
With Pin1 high, if Pin2 is set high and Pin7 is pulled low, then current flows from Pin2 to Pin7 driving the motor in anti-clockwise direction. If the states of Pin2 and Pin7 are flipped, then current flows from Pin7 to Pin2 driving the motor in clockwise direction.
The above concept holds true for other side of the IC too. Connect your motor to Pin11 and Pin14; Pin10 and Pin15 are input pins, and Pin9 (E2) enables the driver.
Parts required
| Parts | Details | Quantity |
L293D IC |
Motor Driver IC | 1 |
16 Pin Socket |
8x2 DIP Socket | 1 |
Perforated board  |
With 20x12 or more holes | 1 |
Connecting wires  |
Any color of your choice | 10-12 small pieces |
7805  |
Linear Voltage Regulator | 1 |
Male breakaway headers  |
40 pin single row headers | 1 |
Solder  |
Lead / Lead free | 50-100 gms |
Solder Iron  |
Preferably temperature controlled | 1 |
Building the circuit - Part I

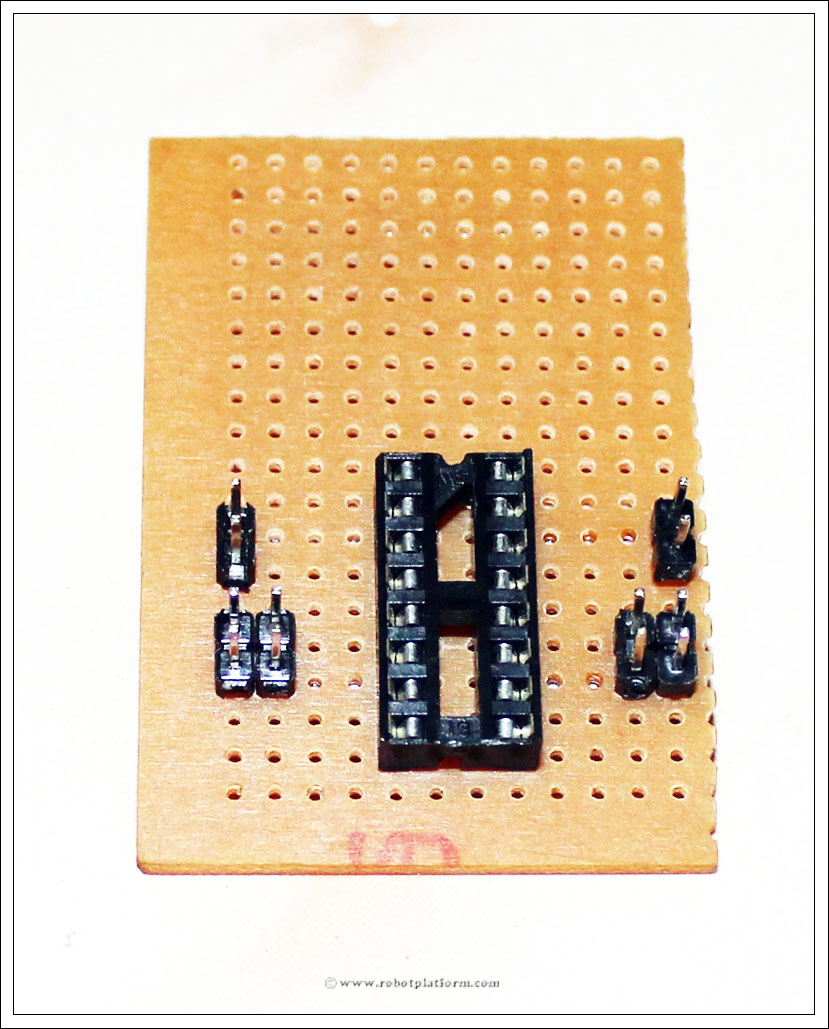
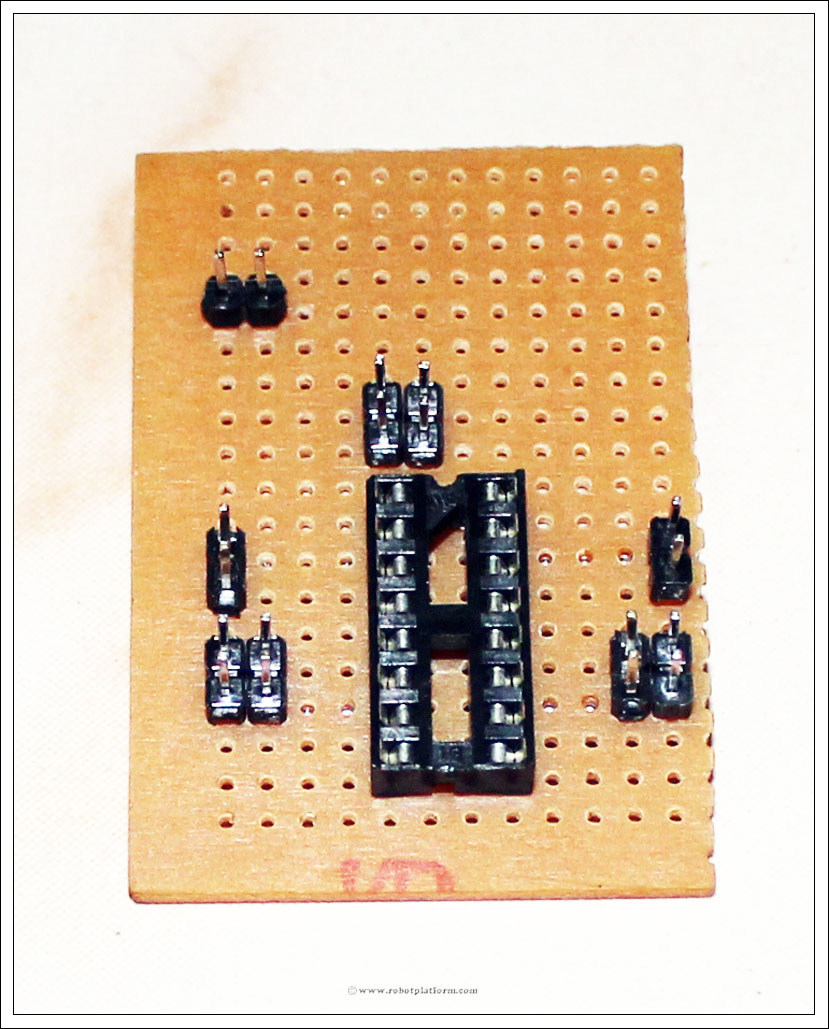
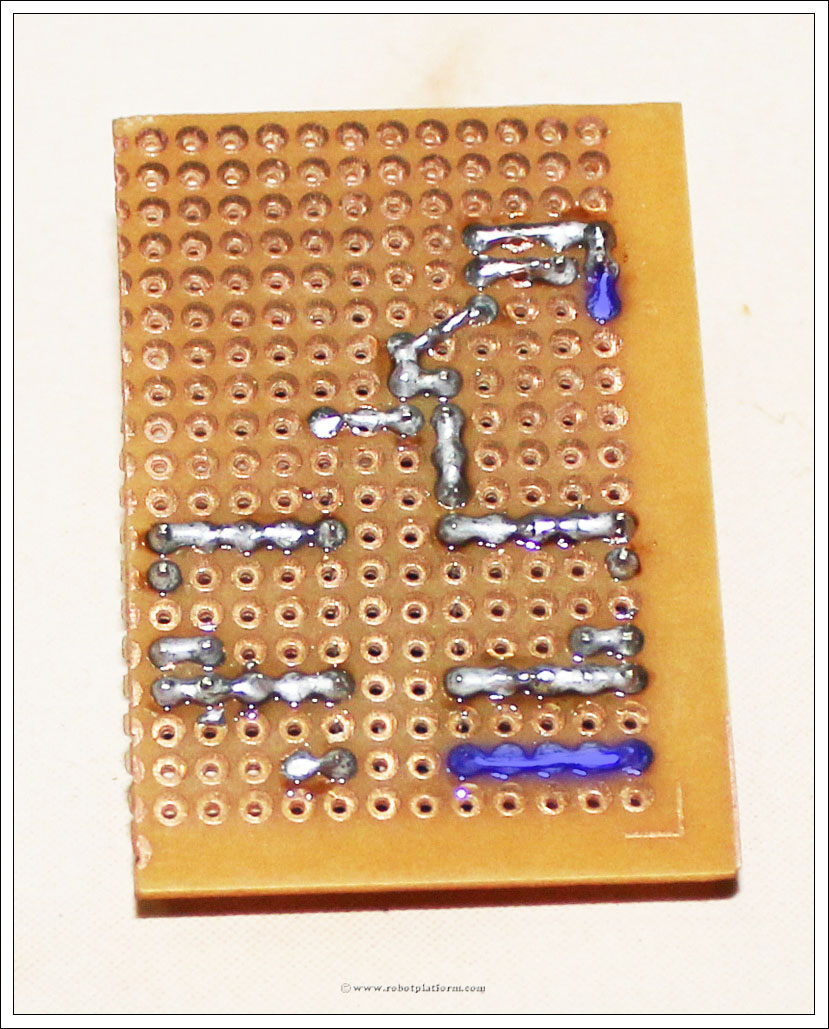
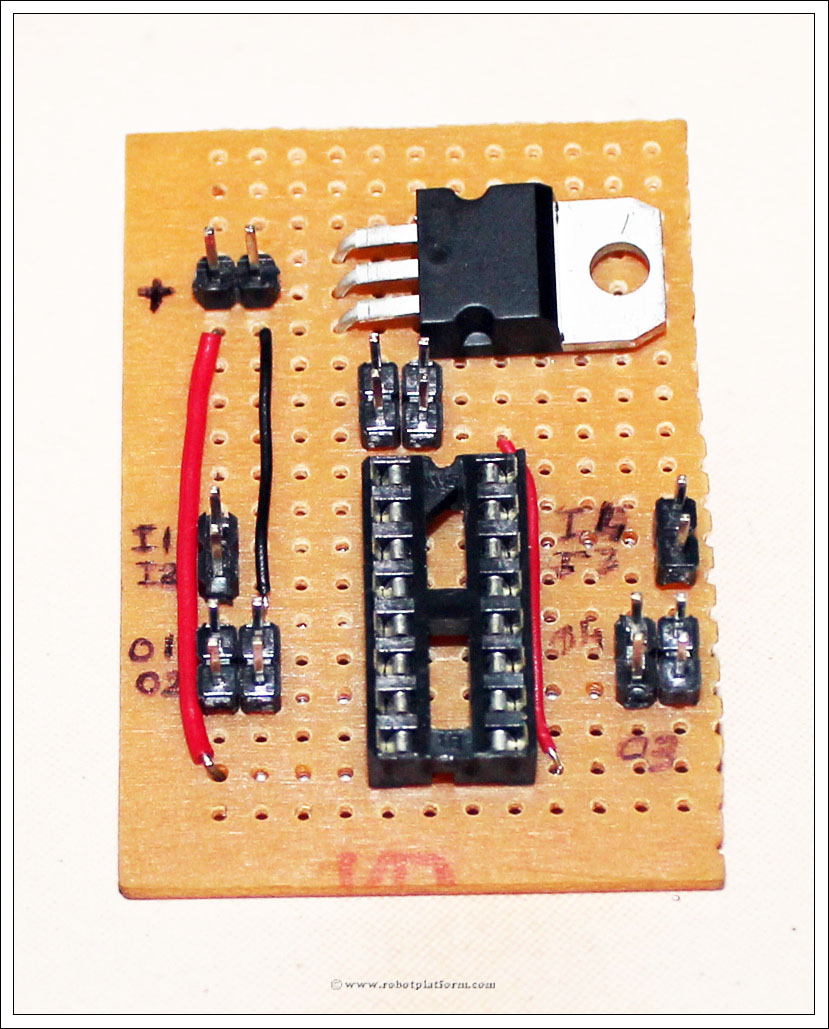
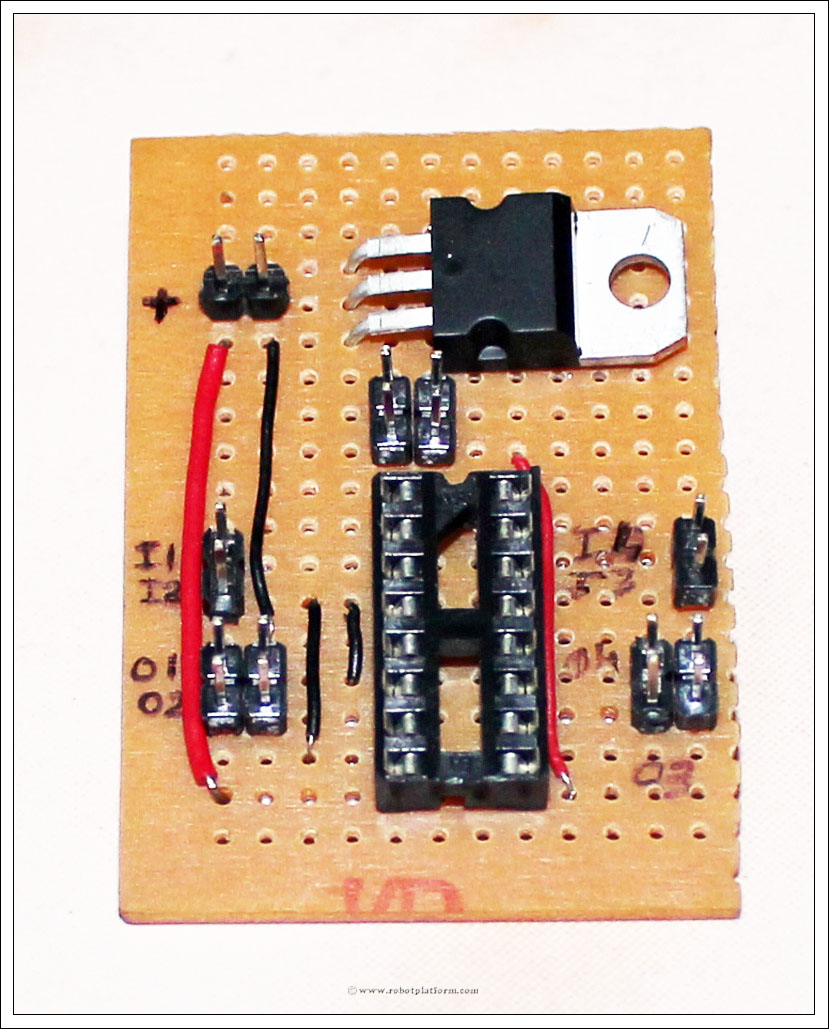
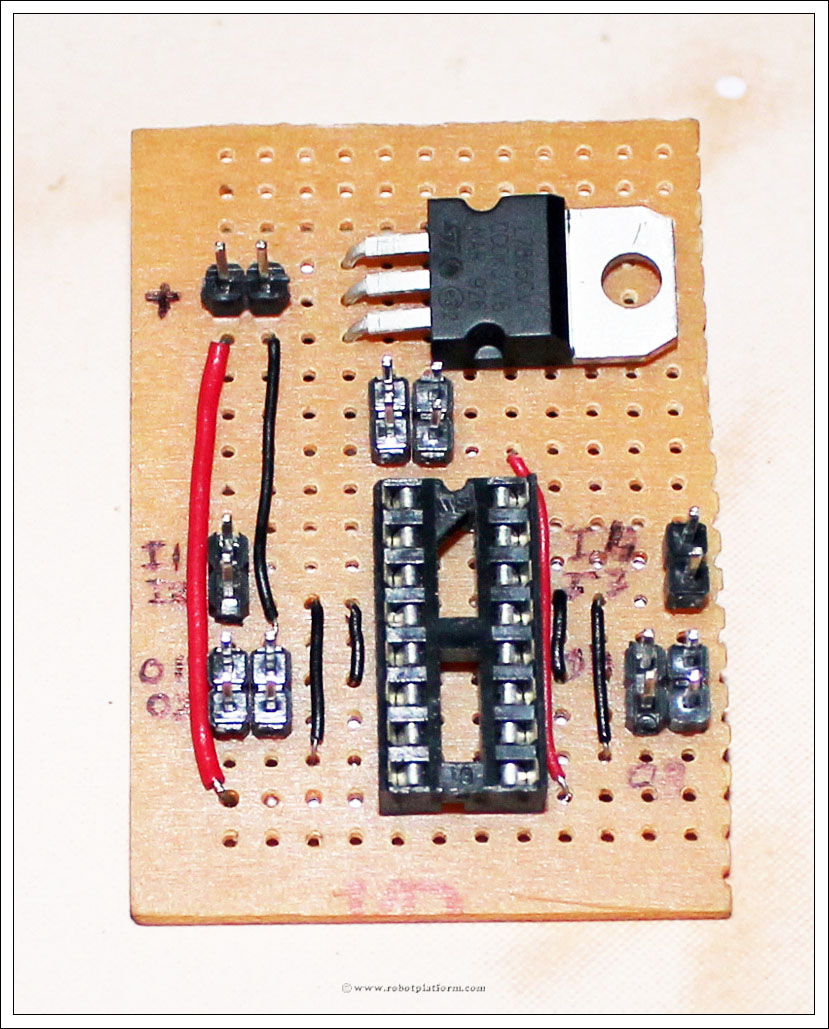
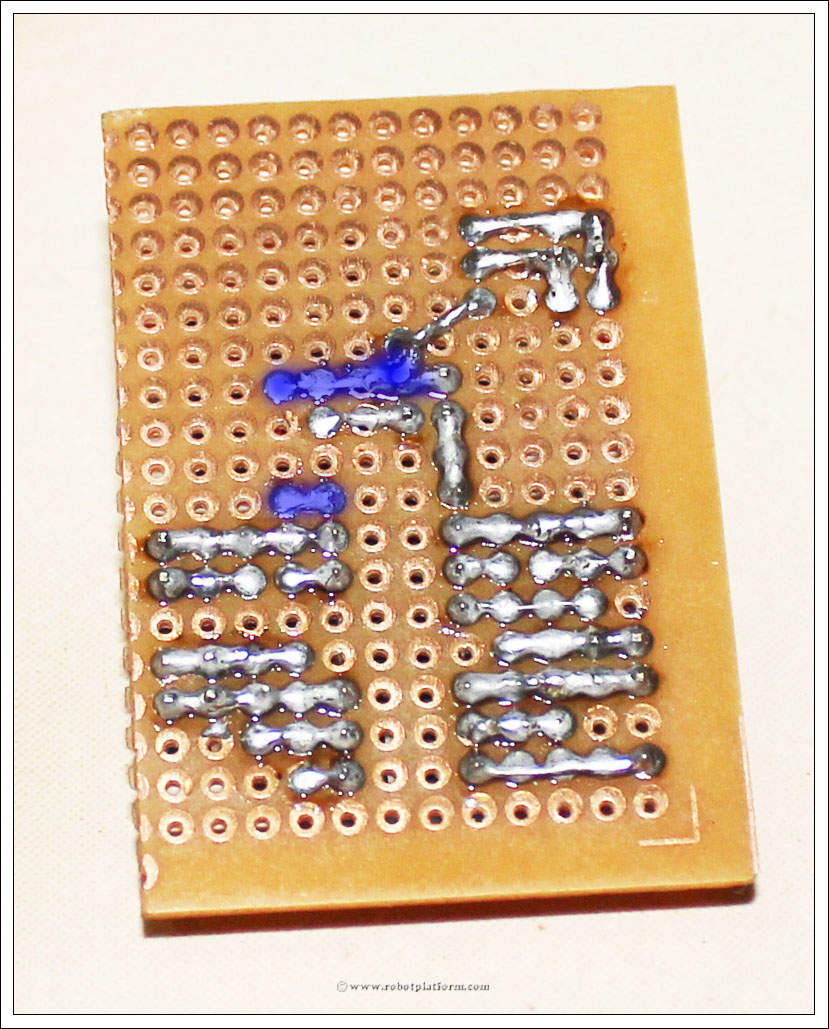
Let's begin building the circuit. First, add 16 pin socket to the board as shown in the image. As usual, click on any image for an enlarged view with higher resolution. If the step requires soldering, then the soldered part is highlighted to help you with soldering.
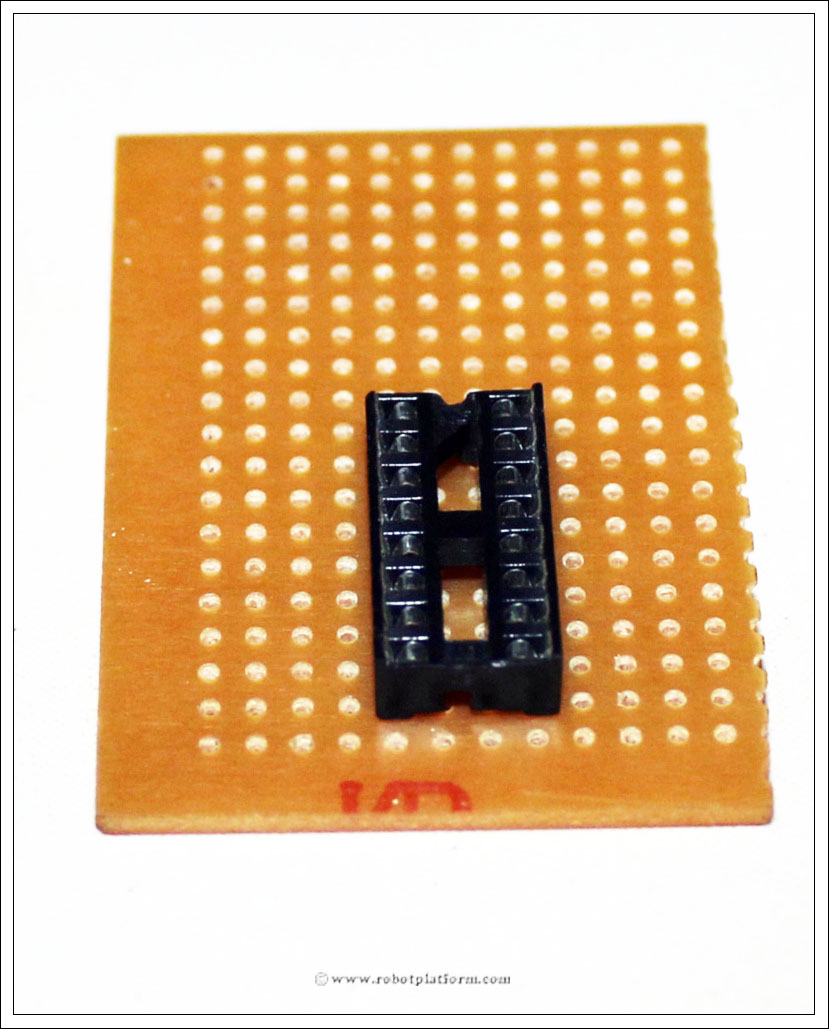
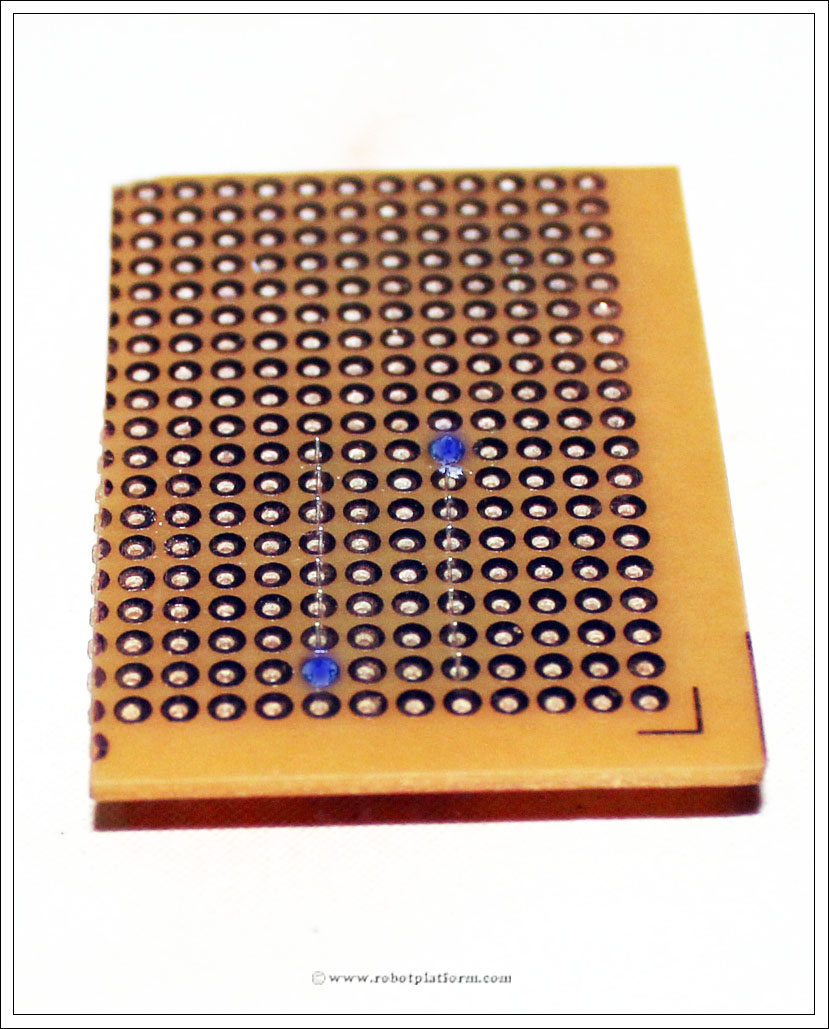
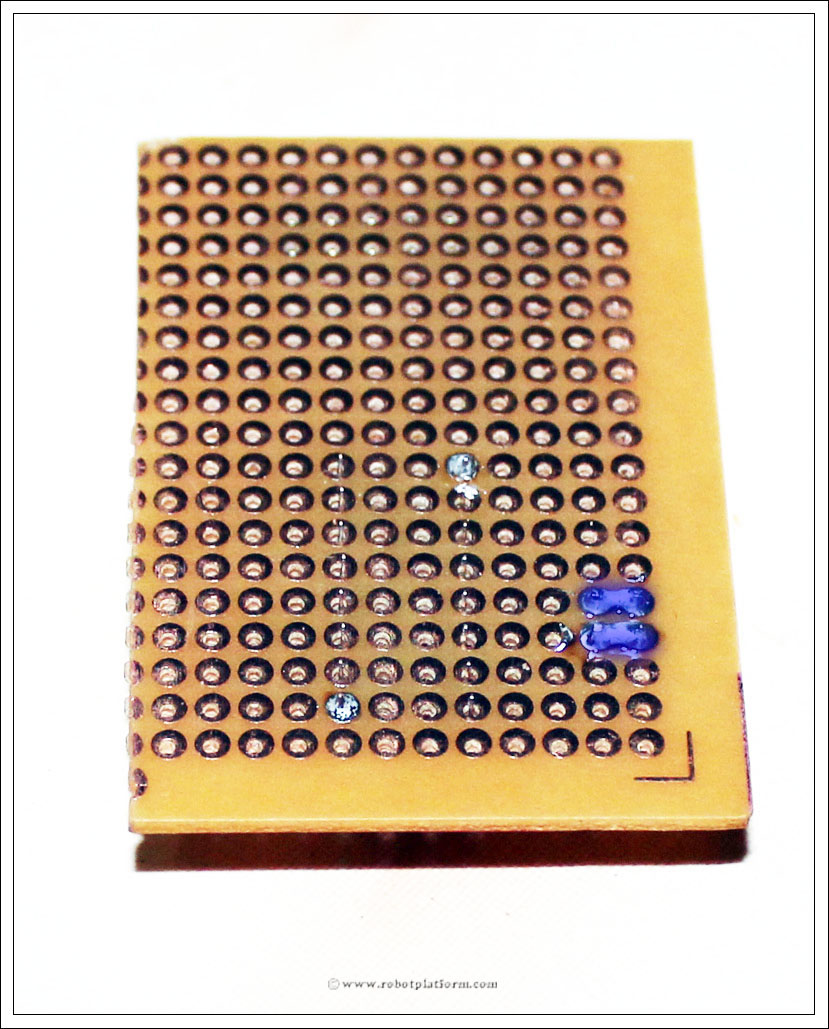
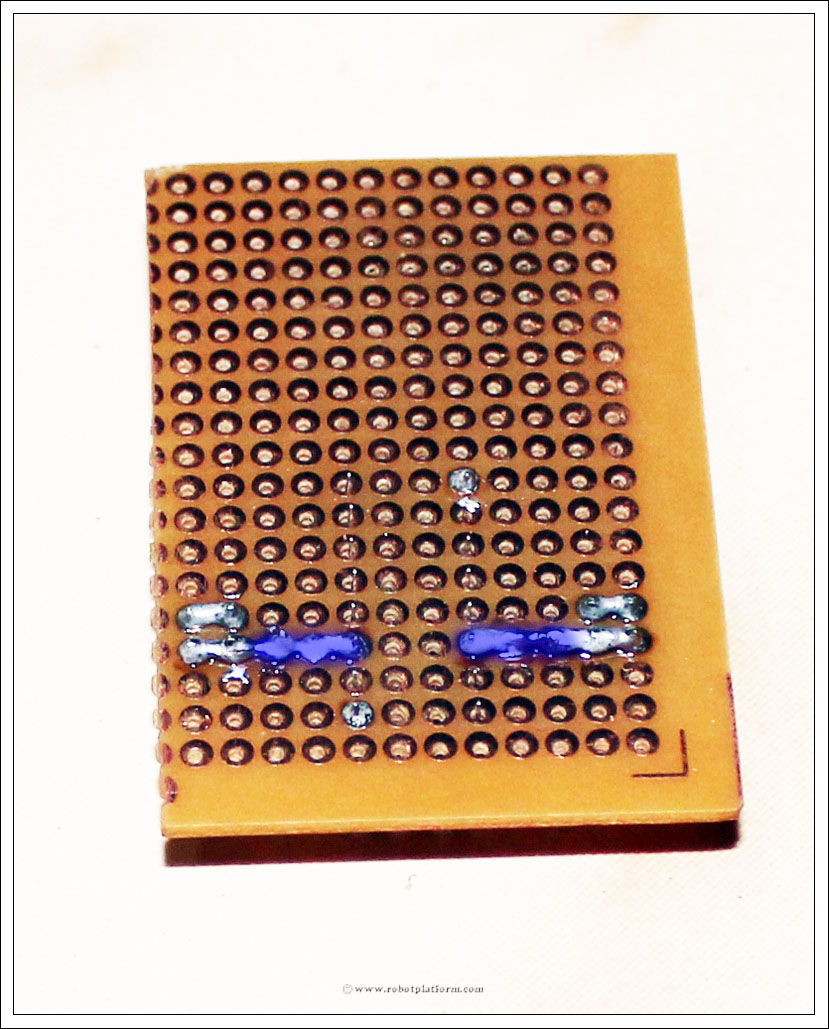
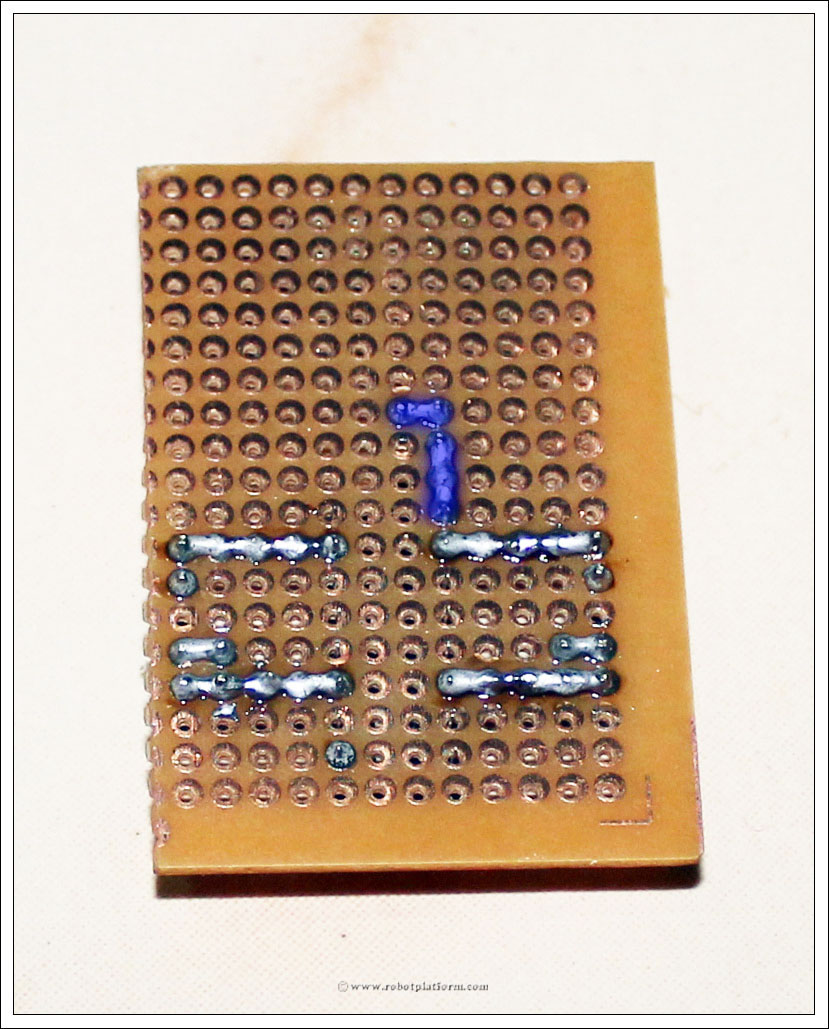
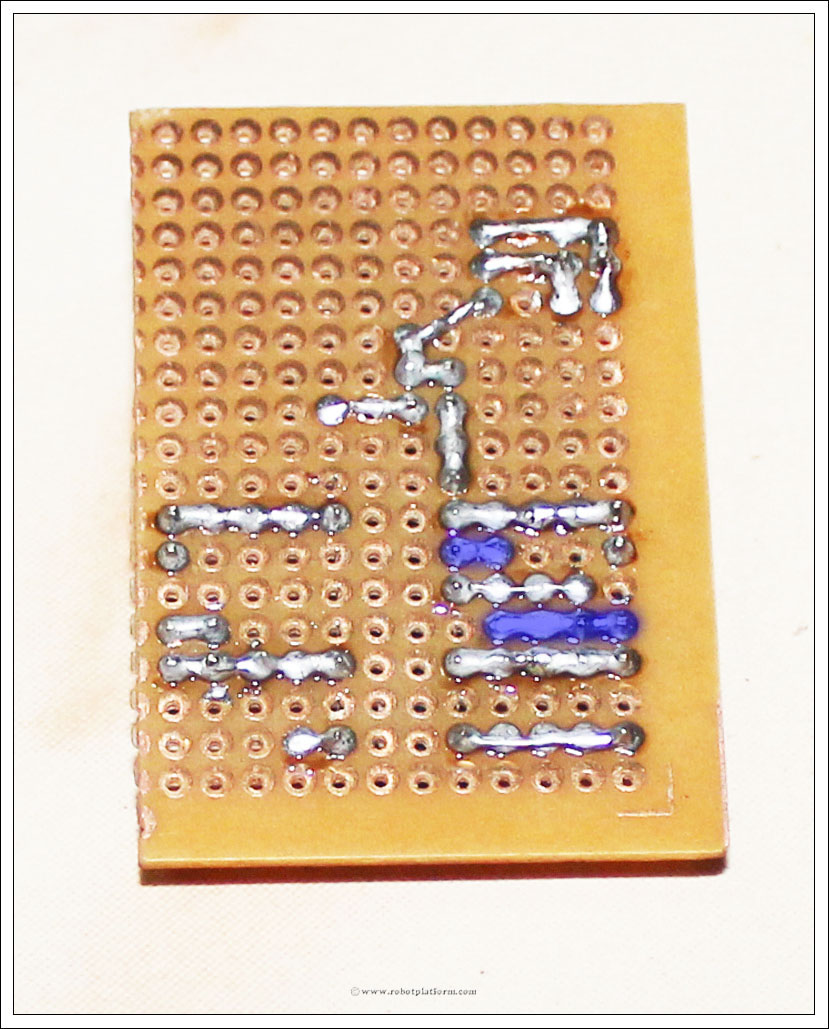
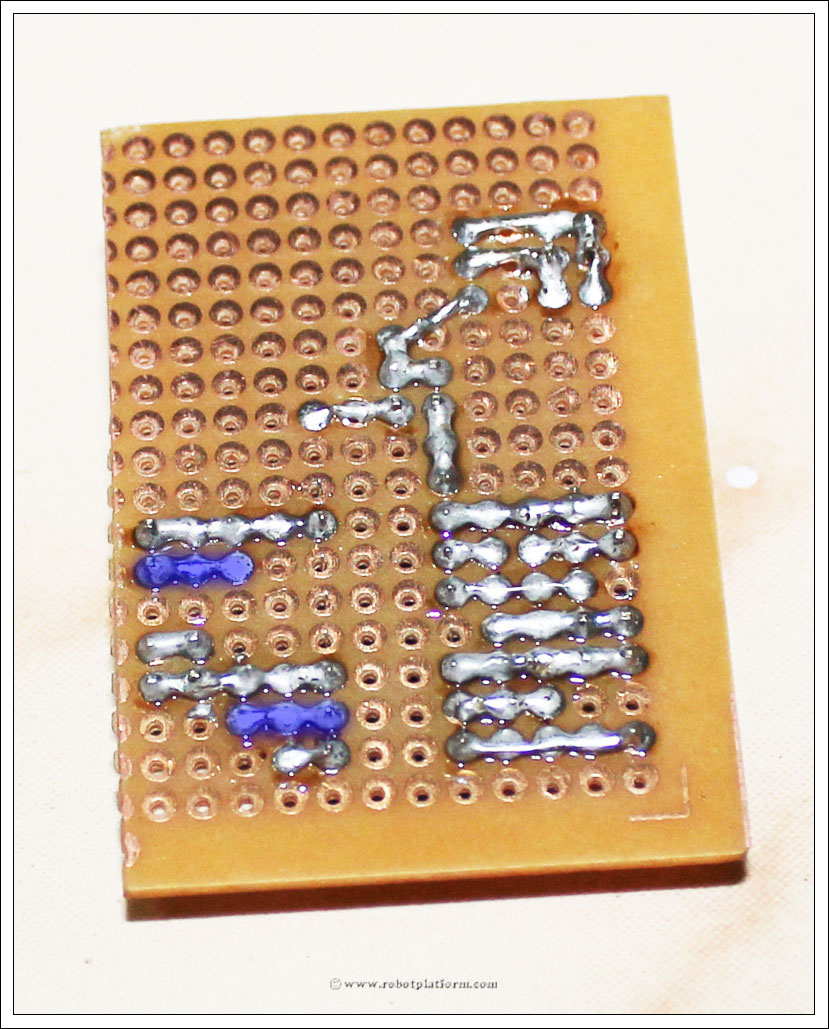
Solder first and 16th pin of the socket to copper side of the board.
Add two 2-pin headers (two 2 pin headers) to the left of socket. Make sure there is at least a gap of two holes between socket and header.
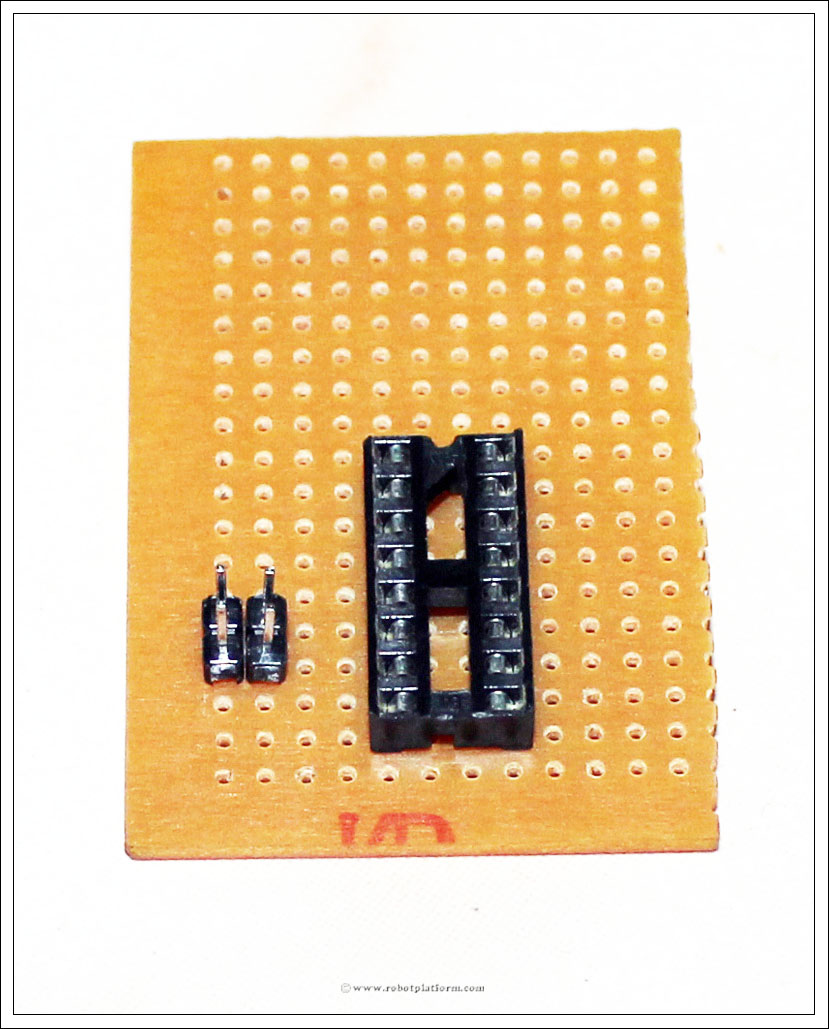
The vertical two pins will be later used to connect the first motor. The other two pins are there in case we need to use this output for some other reason. If you do not need this, you can use a single 2-pin header and plug it vertically and individually solder the two pins to the board.
Add two more 2-pin headers to the right side of the socket with a minimum gap of two holes between socket and header. The gap makes it easier to plug other female headers once the board is completed.
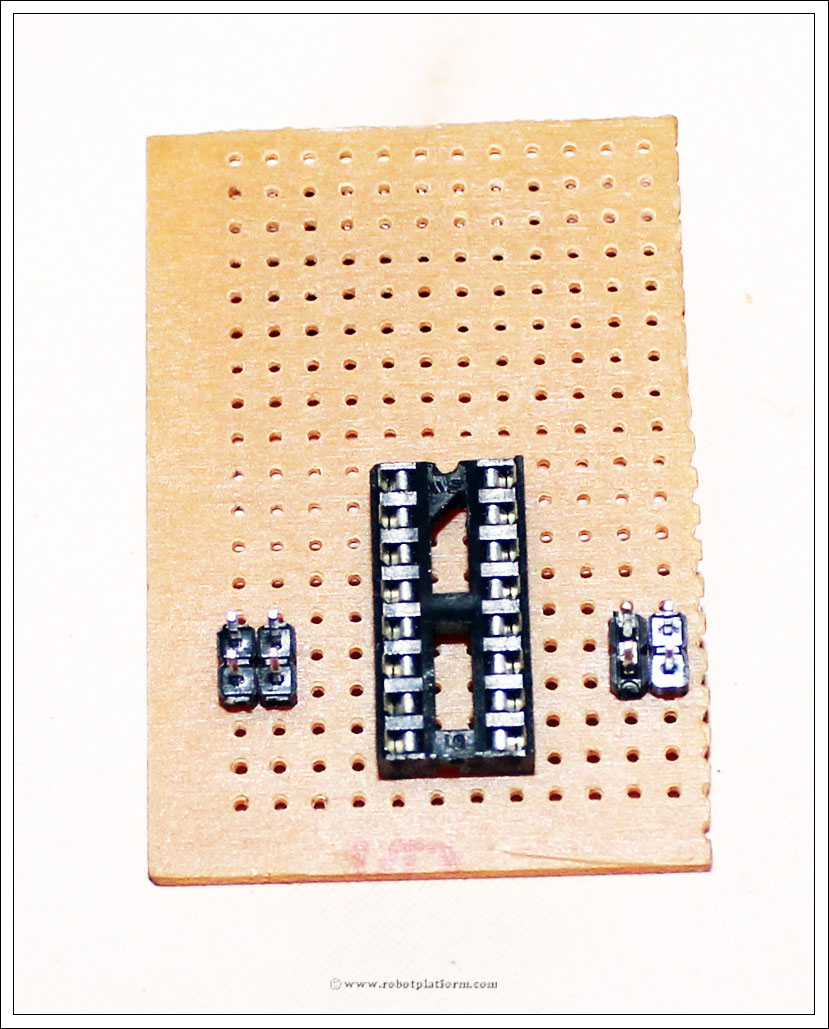
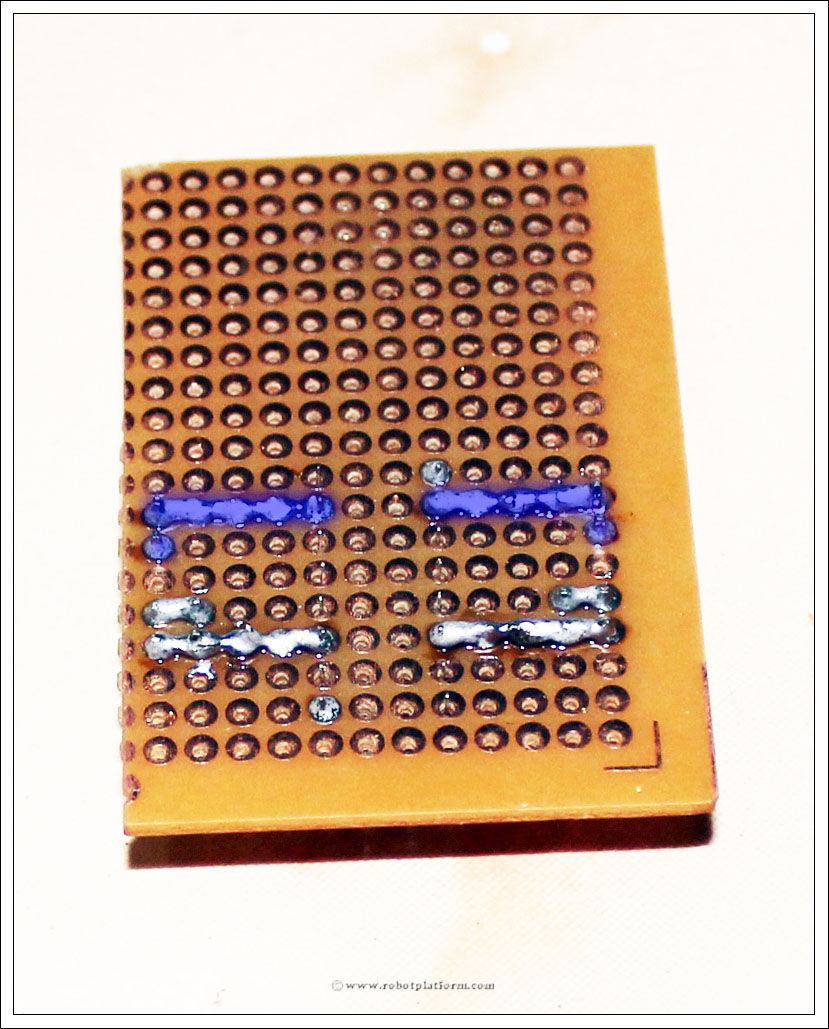
Solder these two headers similar to the left headers
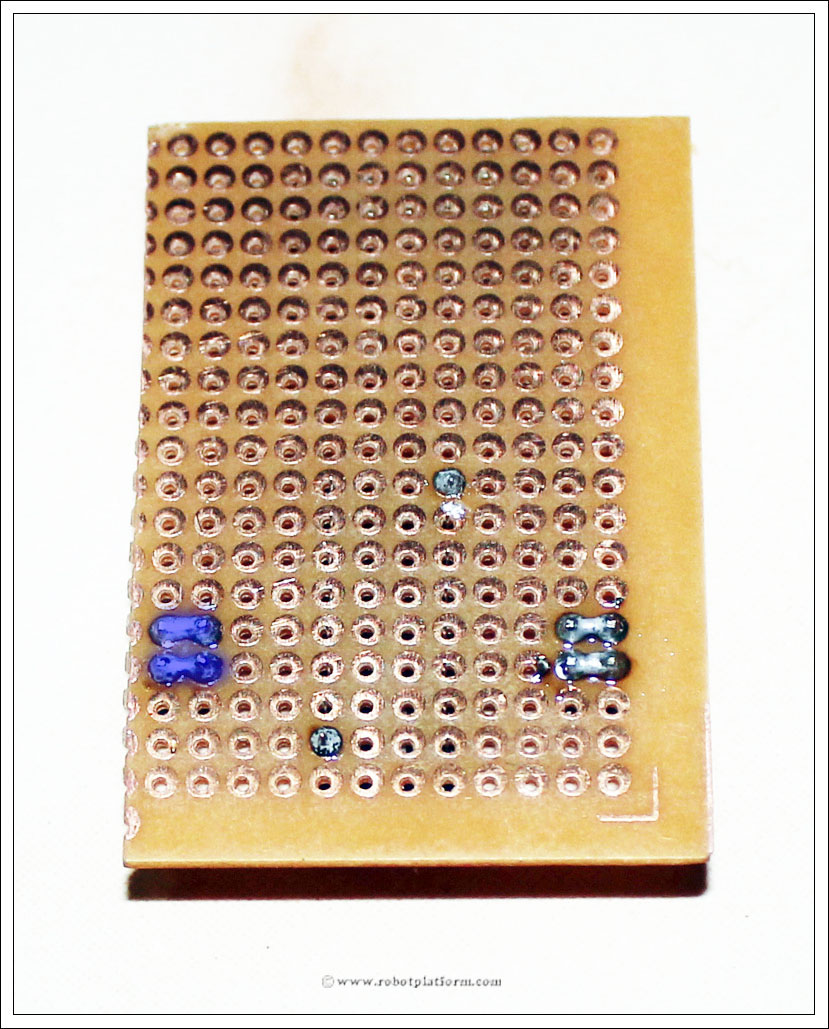
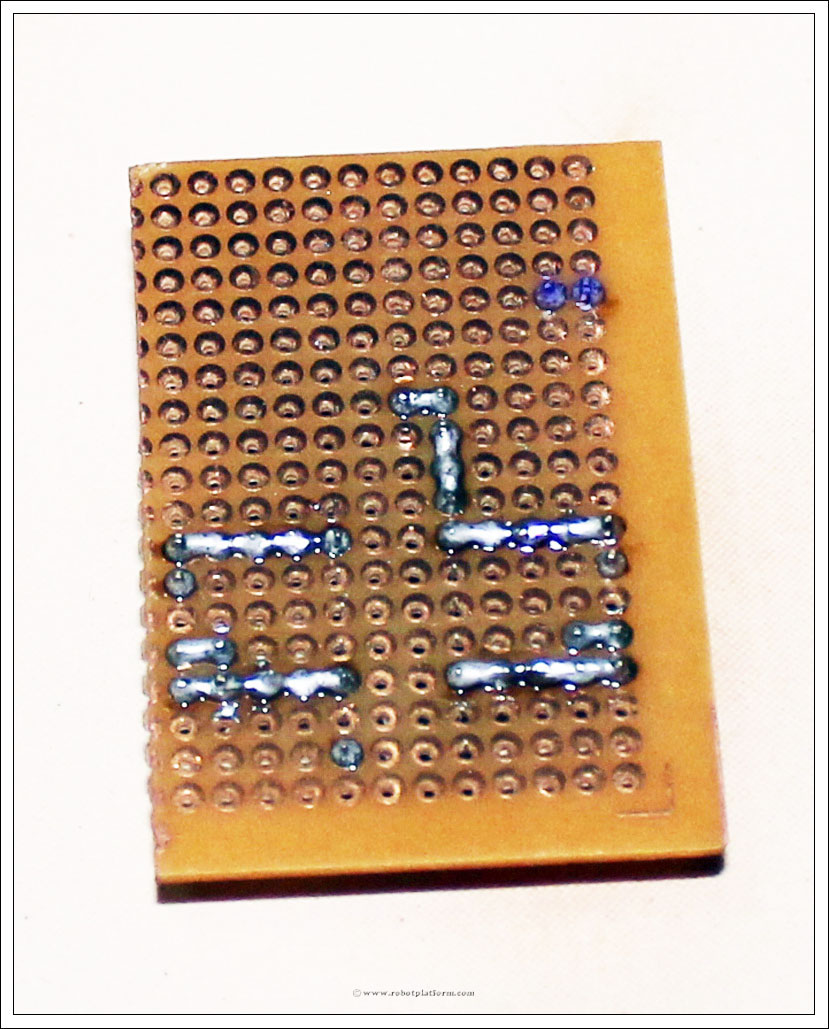
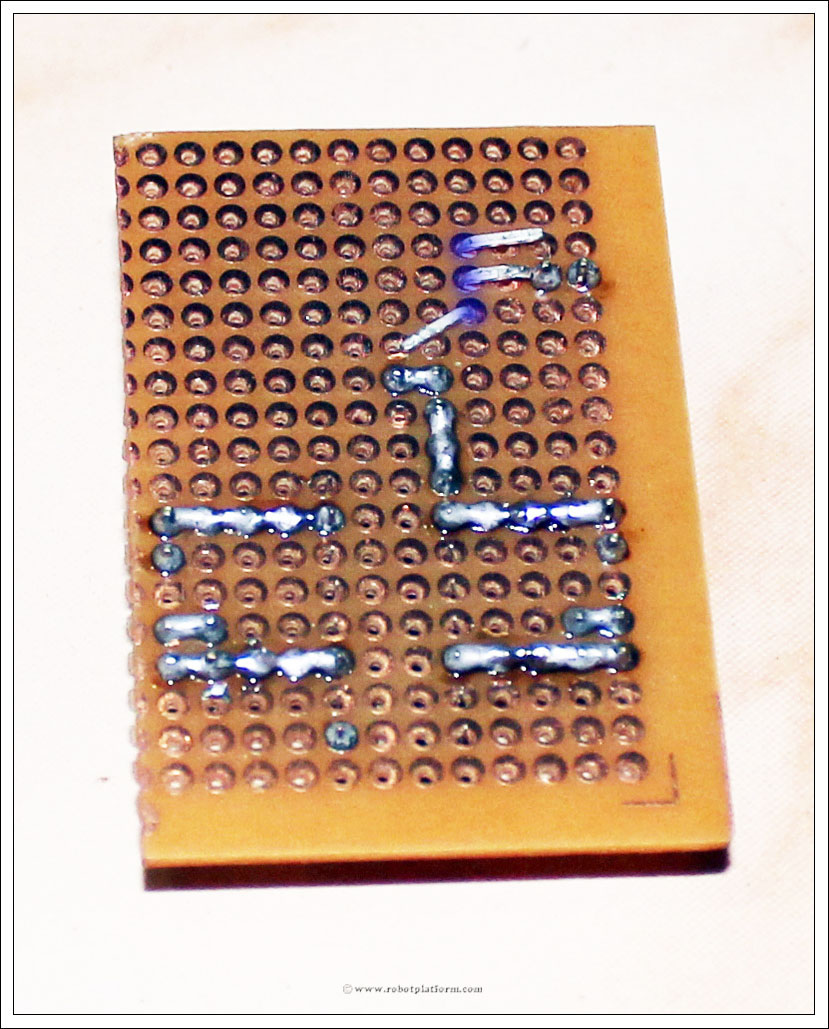
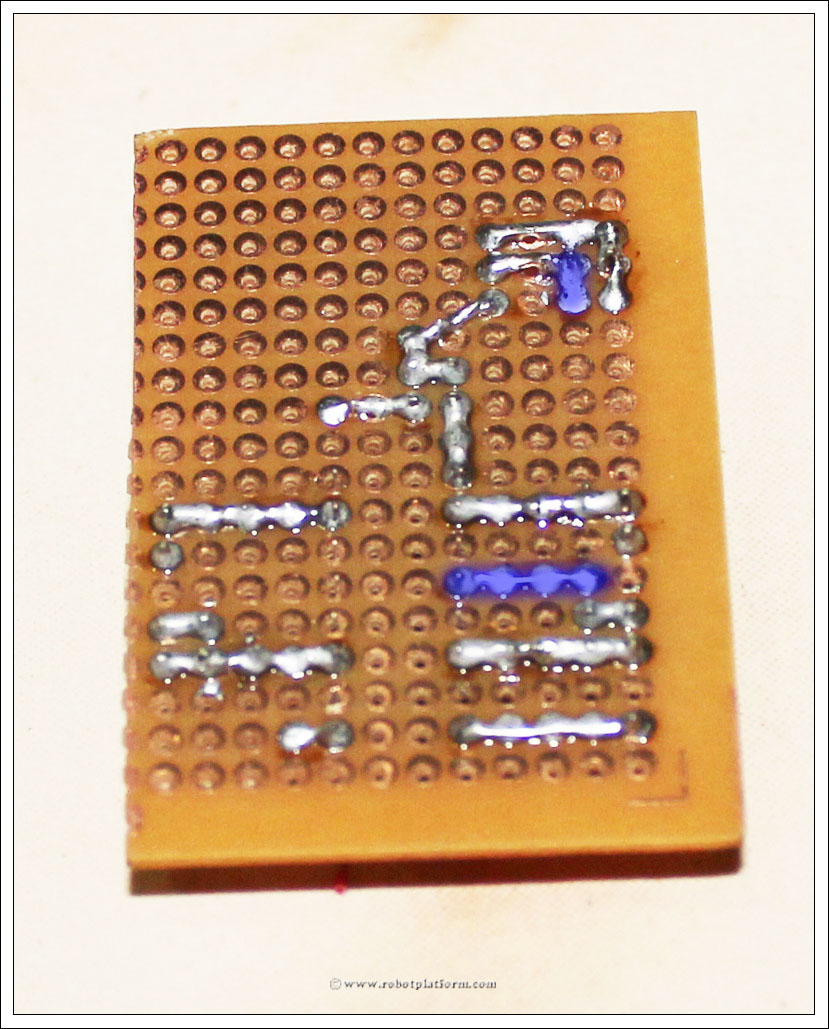
Now solder the bottom pins of two headers on either side to Pin6 and Pin11 of the IC, as shown in the image.
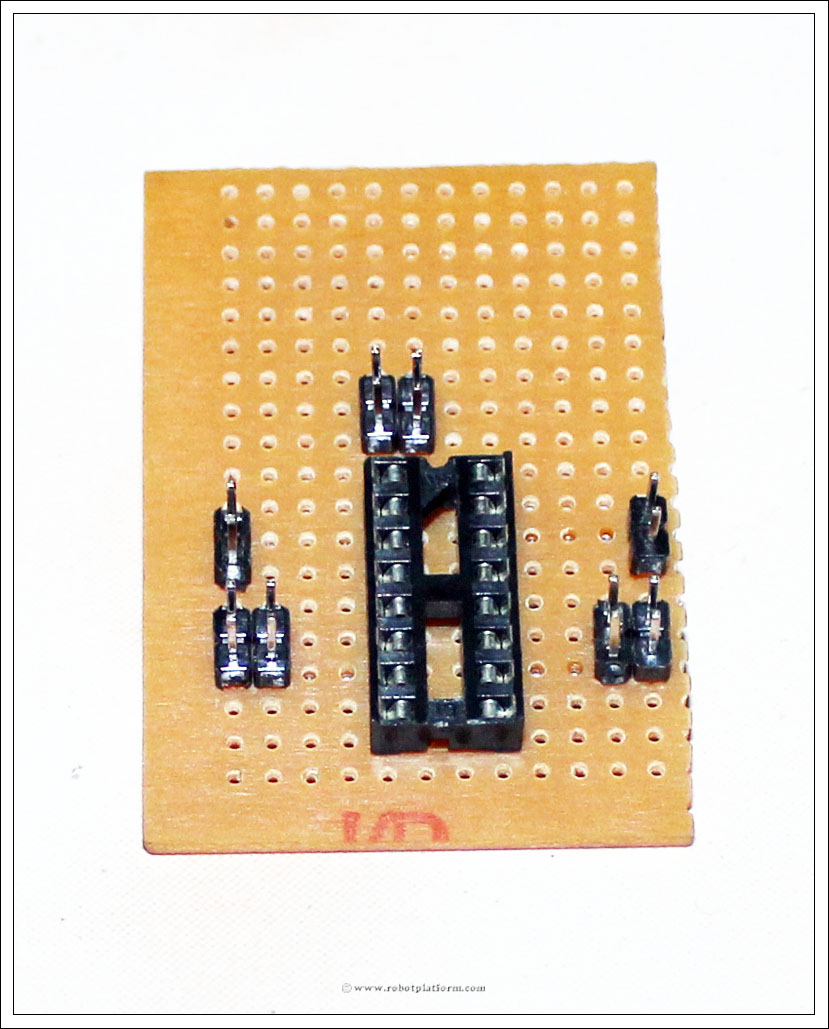
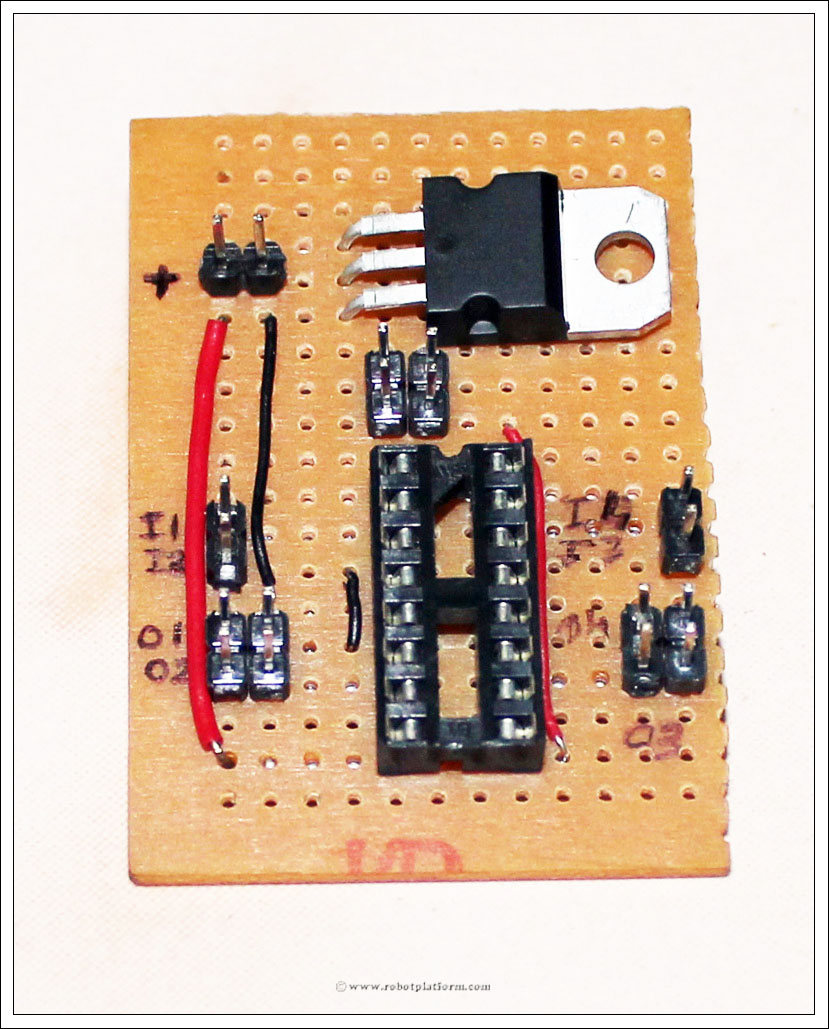
Add two more 2-pin headers to either side of the board. These two headers are input pins which are later connected to microcontroller.
Solder each pin of the header to the board, but take care not to solder them together. As shown in the image, solder the top two header pins on either side to Pin2 and Pin15 respectively.
We need two more 2-pin headers, one header for enable pins and other for +5V. Push the two 2-pin headers as pictured below. Let the first two vertical pins be in the same line as the socket pins.
Observe carefully how the soldering happens from here on if you are not sure what is happening. I can assure that you would have a complete working circuit if you follow the tutorial exactly.
The top two header pins are soldered together. One of the pin in bottom header is soldered to Pin1 of the socket. Click on the image to understand what I mean.
We will add two more pins for powering the circuit (we will call these two pins as Power pins to make soldering easier).
Solder each pin of the header to the board, but do not short them.
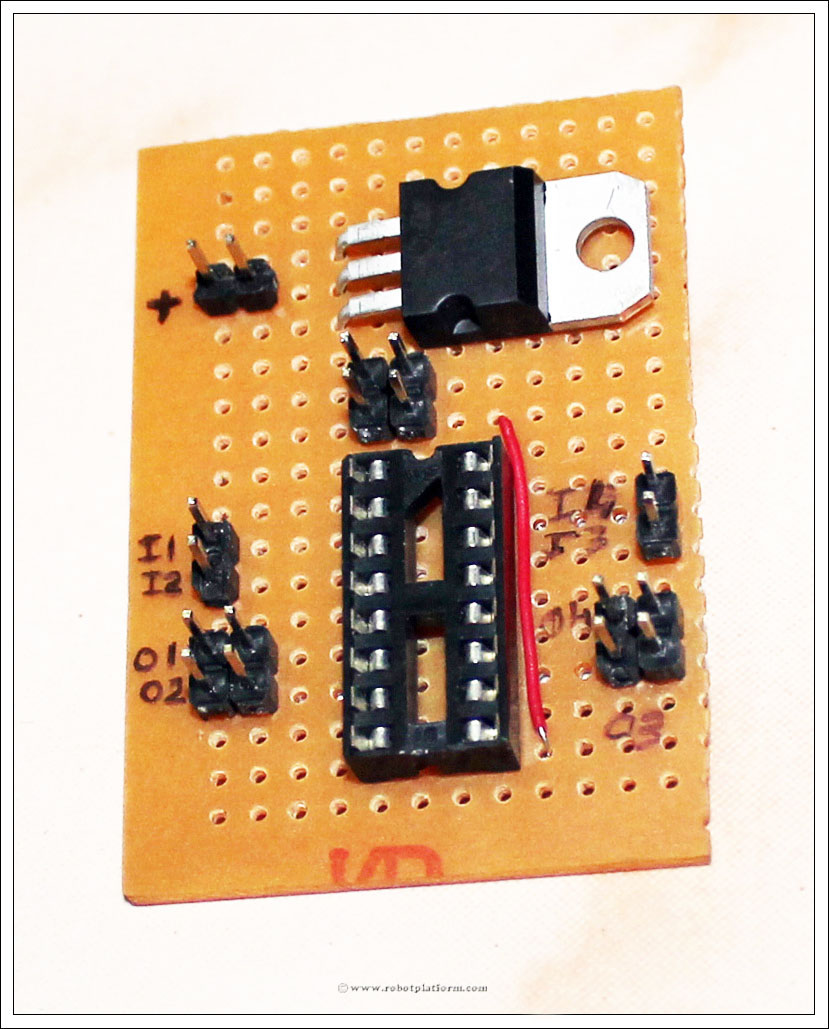
Add a 7805 voltage regulator such that the center pin is in line with power pins. I have bent the regulator to make it look compact (or I just like to keep it like that). If you do not want to bend it, keep it upright.
The top lead of regulator is input (Vin), middle lead is ground (Gnd) and the bottom lead is output (Vout) which gives a regulated +5volts.
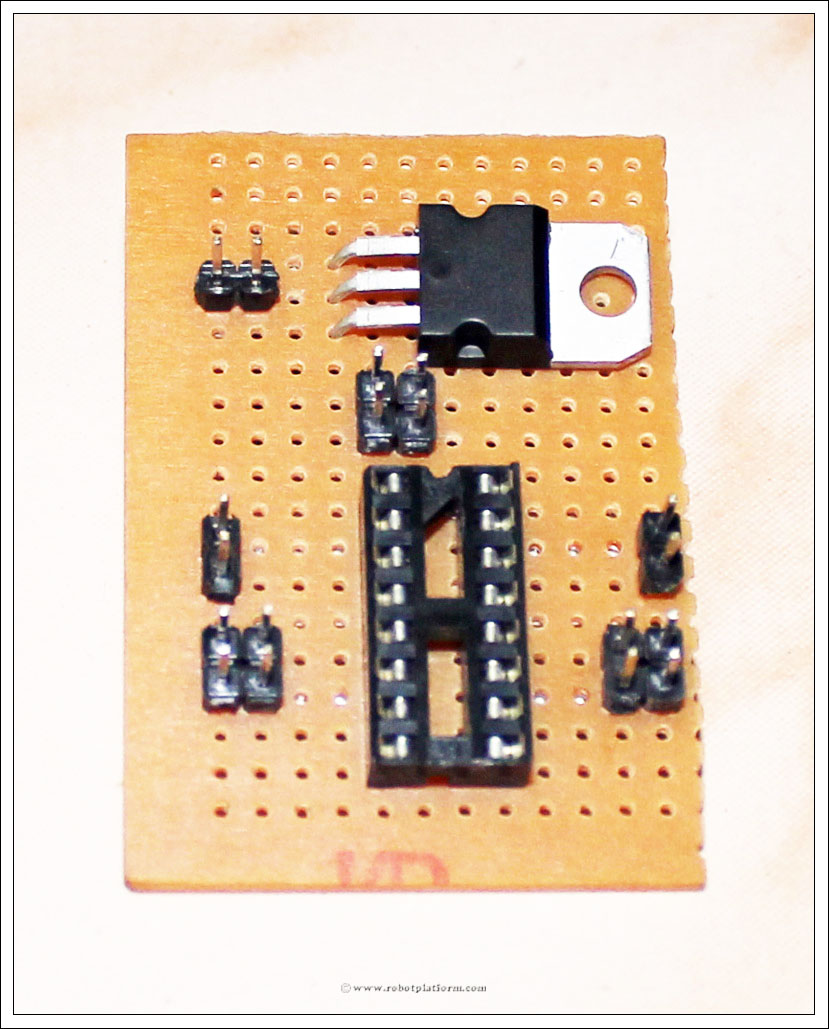
Bend the regulator leads as shown. The middle pin almost touches one of the power pins. If the regulator lead (the middle one) is too long such that it touches both the power pins, cut it short. Vin should also be bent in the same fashion. Vout is bent such that it touches the headers above enable pins.
Add a red wire (or any color) to connect Pin9 to enable pin. Push one side of the wire next to Pin9 and the other side to a hole above the socket (as shown below). I have used a marker to mark the pins to avoid confusion.
Solder the pins and wires carefully as mentioned below:
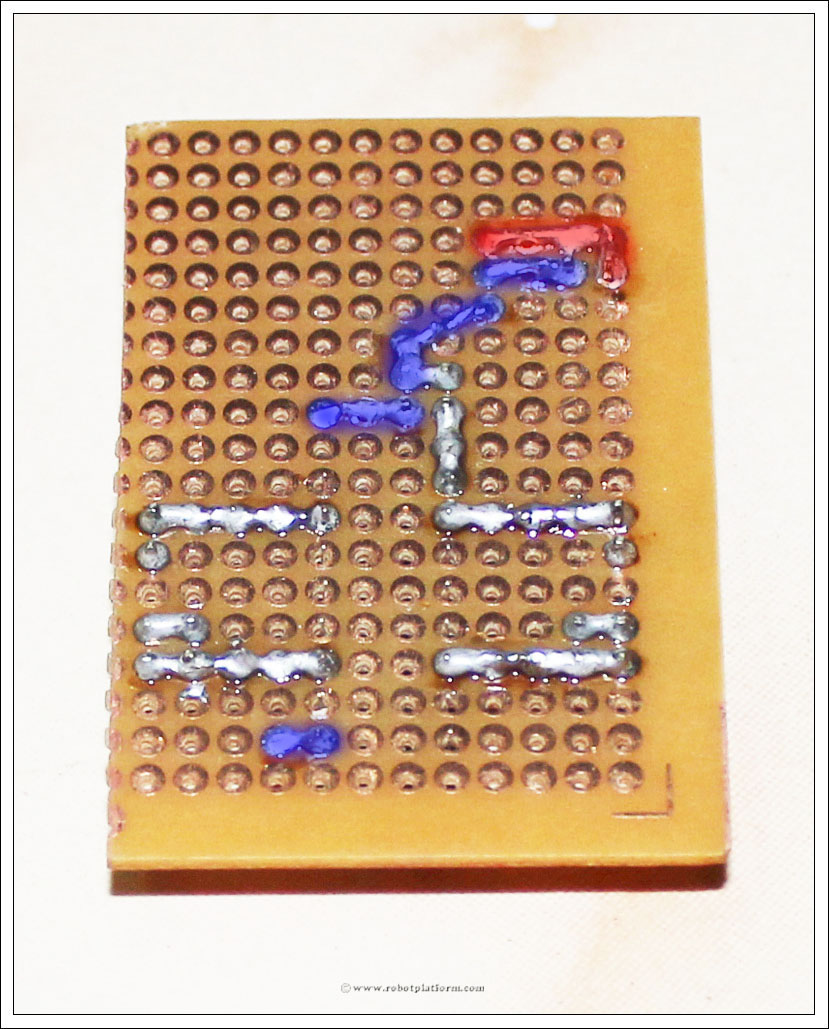
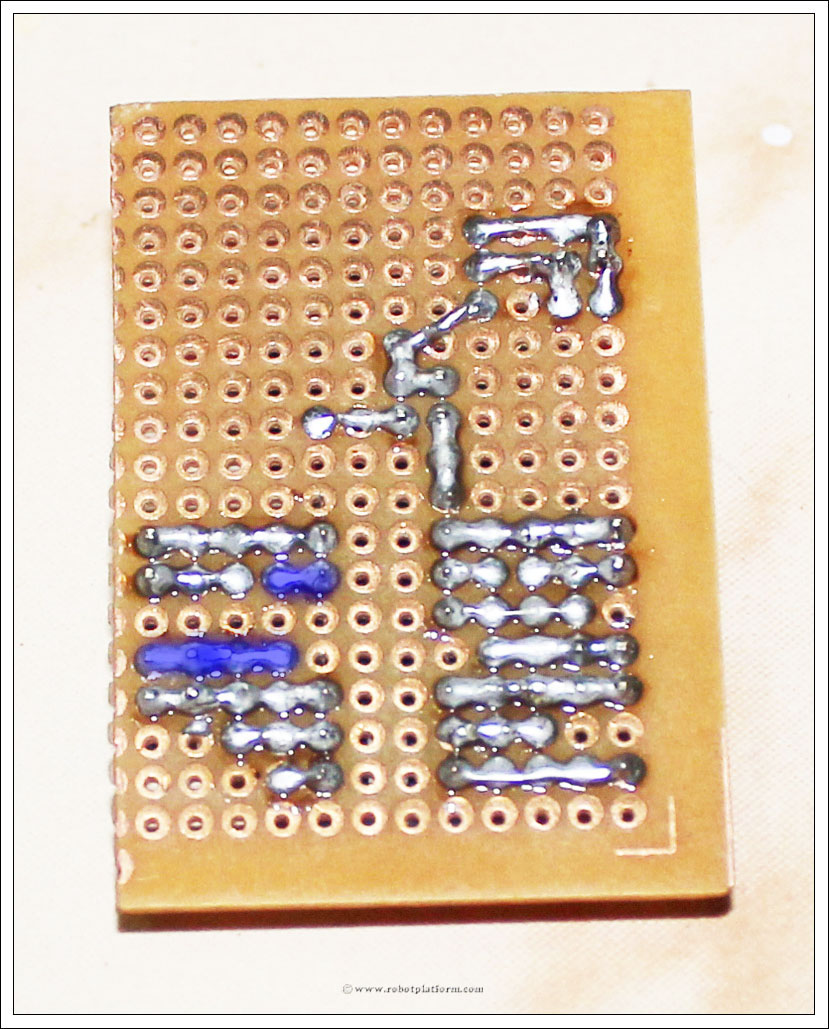
- Solder one side of the wire to Pin9 (Click to enlarge the image. The bottom highlighted part)
- The other side of the wire will be soldered to second pin of enable header
- Vout from regulator (bottom lead) is soldered to header above enable pins
- Gnd from regulator (middle lead) is connected to left power pin (left pin if the copper side of board is on top)
- Vin from regulator (top lead) is connected to right power pin
Add a red wire running from positive of power pin to Pin8 of the socket.
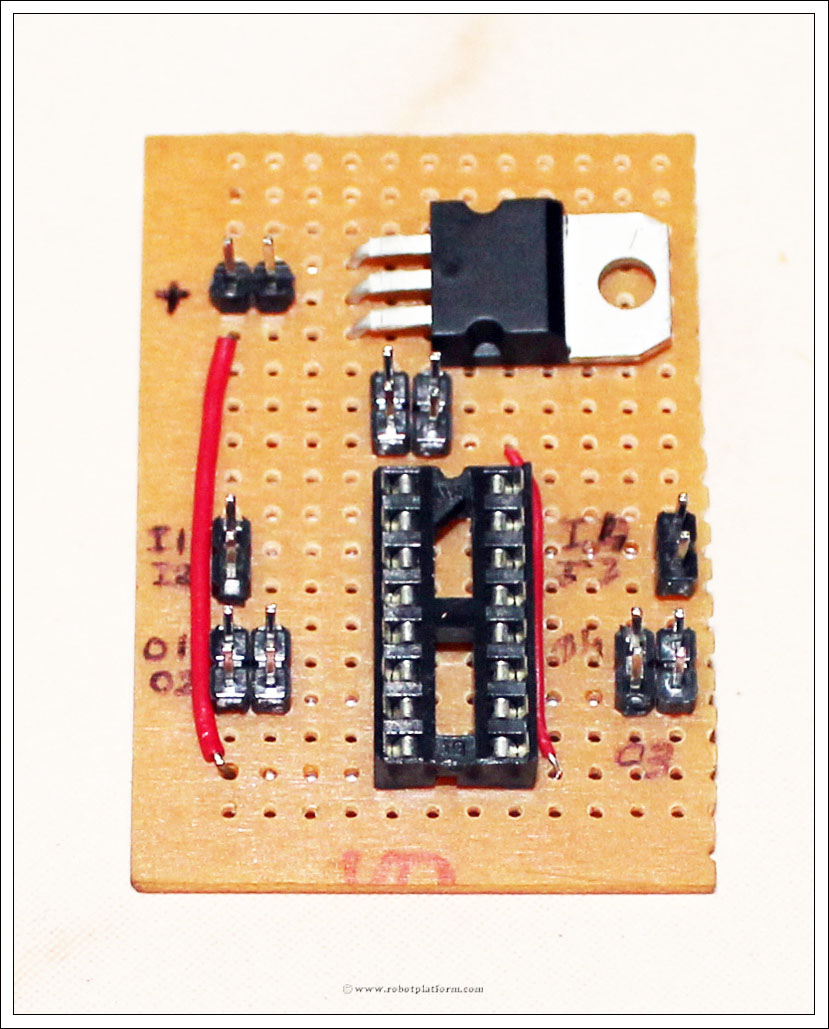
Solder one end of red wire to positive of power pin and the other end to Pin8
Add another black wire to connect ground. Push one end below the ground of power pins and the other end next to Pin4 of the socket
Solder the black wire as shown here. One side connects ground of power pins and other side connects Pin4.
Cut and trim a small wire and place it in two holes next to Pin3 and Pin5 of the socket.
This wire connects output1 of L293D IC to header pin. Solder top side of the wire to Pin3 and bottom side of the wire to first output header pin on the left. (marked O1)
Add a slightly larger black wire next to previously added black wire such that the top end of the wire is in the same row of the black small wire, but the bottom end is two holes next to Pin7 of the socket.
Add a similar wire to right side of the board as shown in the image. The top end of the wire should be pushed next to Pin14 and bottom end next to Pin10 of the socket. This connects input pin of IC to right input pin (marked I3)
Solder top end of the wire to header pin (marked I3) and bottom end to Pin10.
You are almost done!! Push the top end of a wire into a hole next to Pin14 and the bottom end next to Pin12 of the socket.
Solder the top end to Pin14 of the socket and bottom end to right output header pin (marked O4)
Since we need to power the components inside the IC, add a red wire which connects +5V to Pin16 of the socket. The two pins above enable pins are already connected to +5V and we can push one end of the wire to a hole next to that and other end next to Pin16.
Solder Pin16 to bottom end of the wire while top end of the wire is soldered to header pins above enable pins, which is further connected to Vout of regulator.
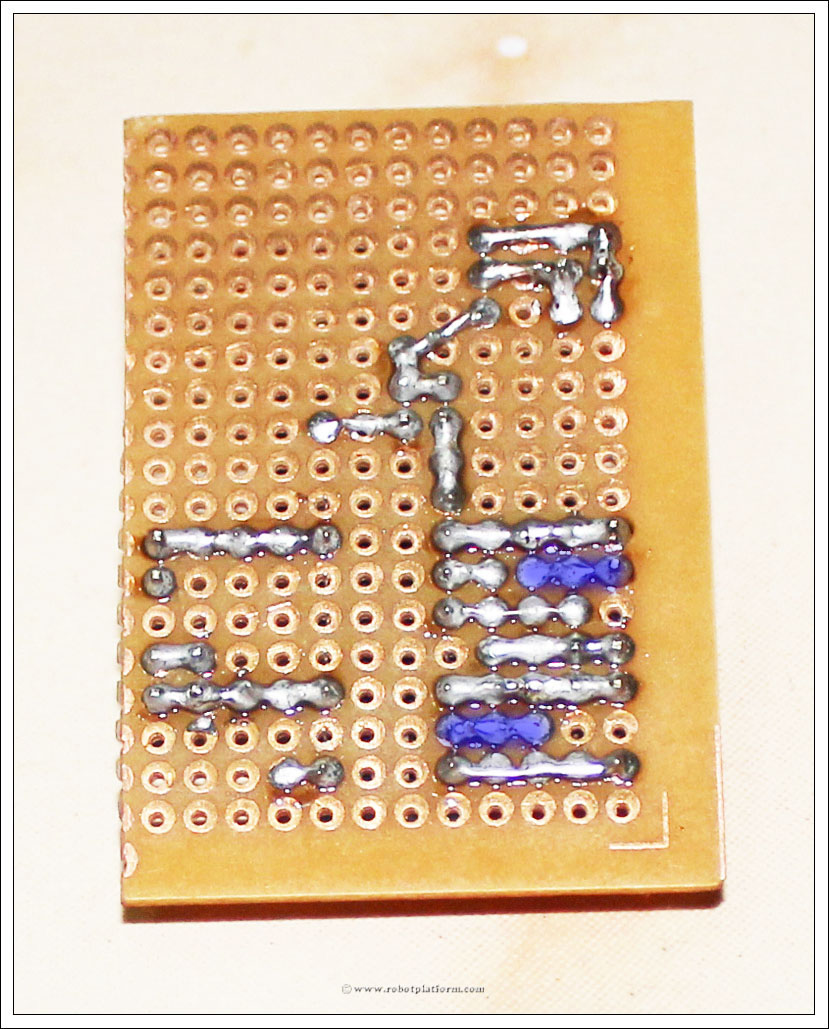
Lastly, solder all four ground pins together. Pin4, Pin5, Pin12 and Pin13 are all ground pins; solder them together.
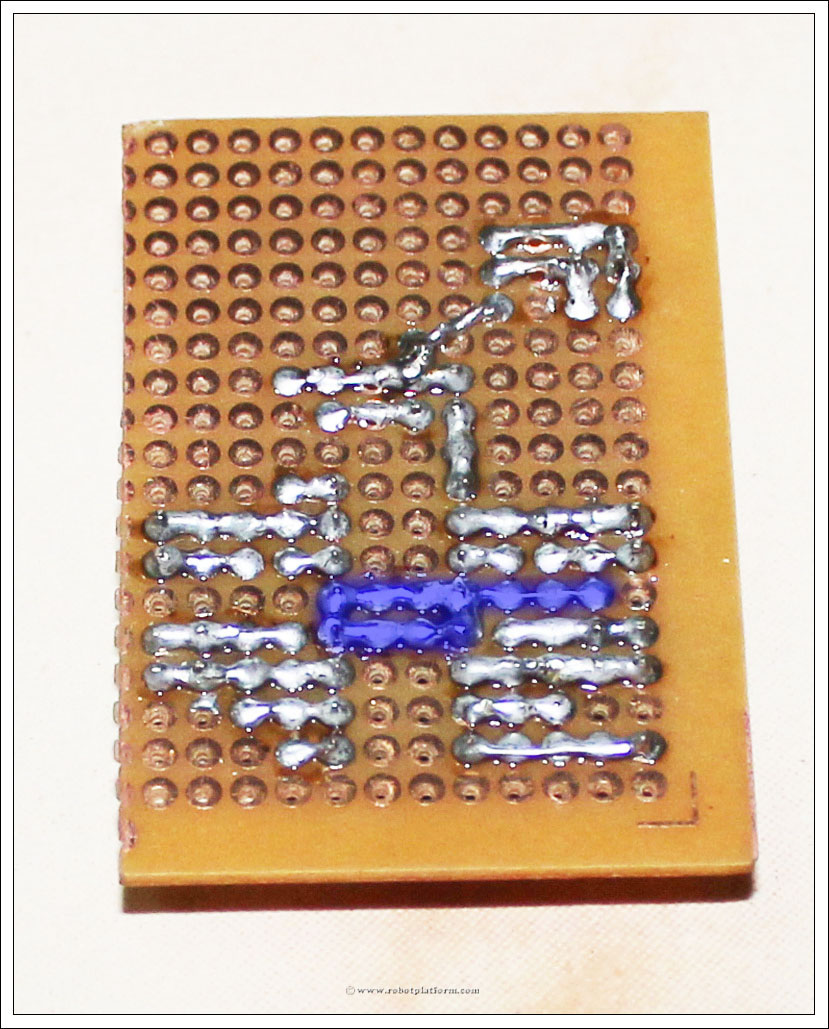
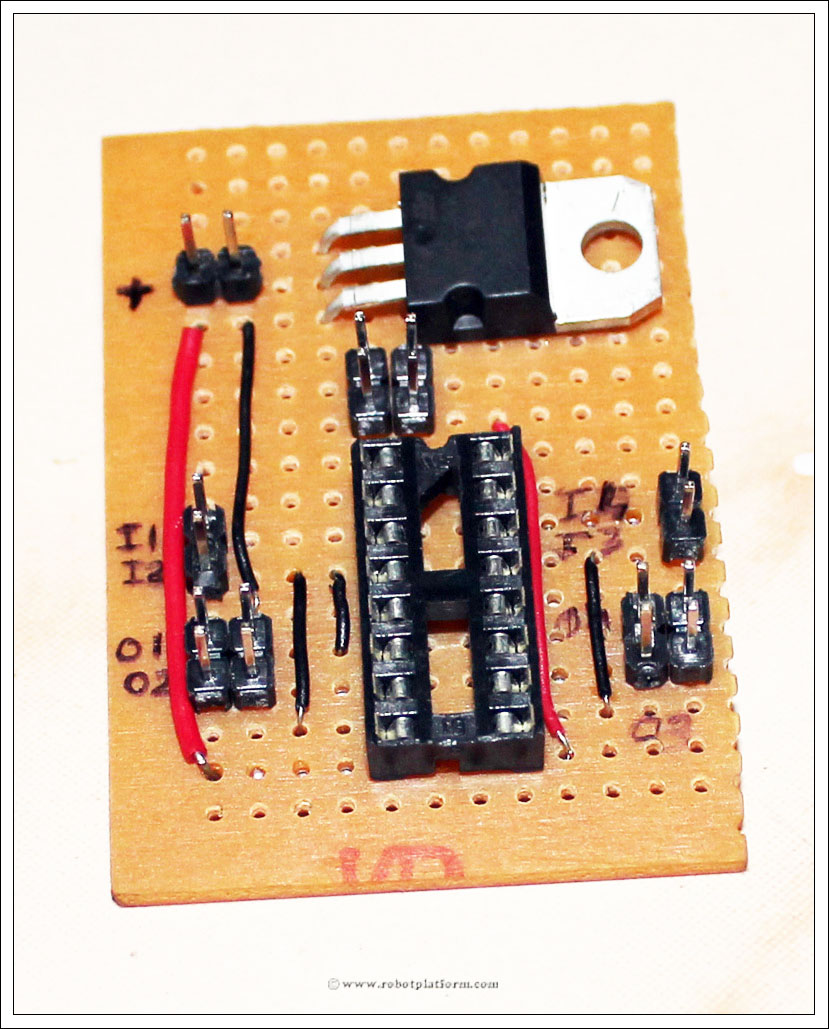
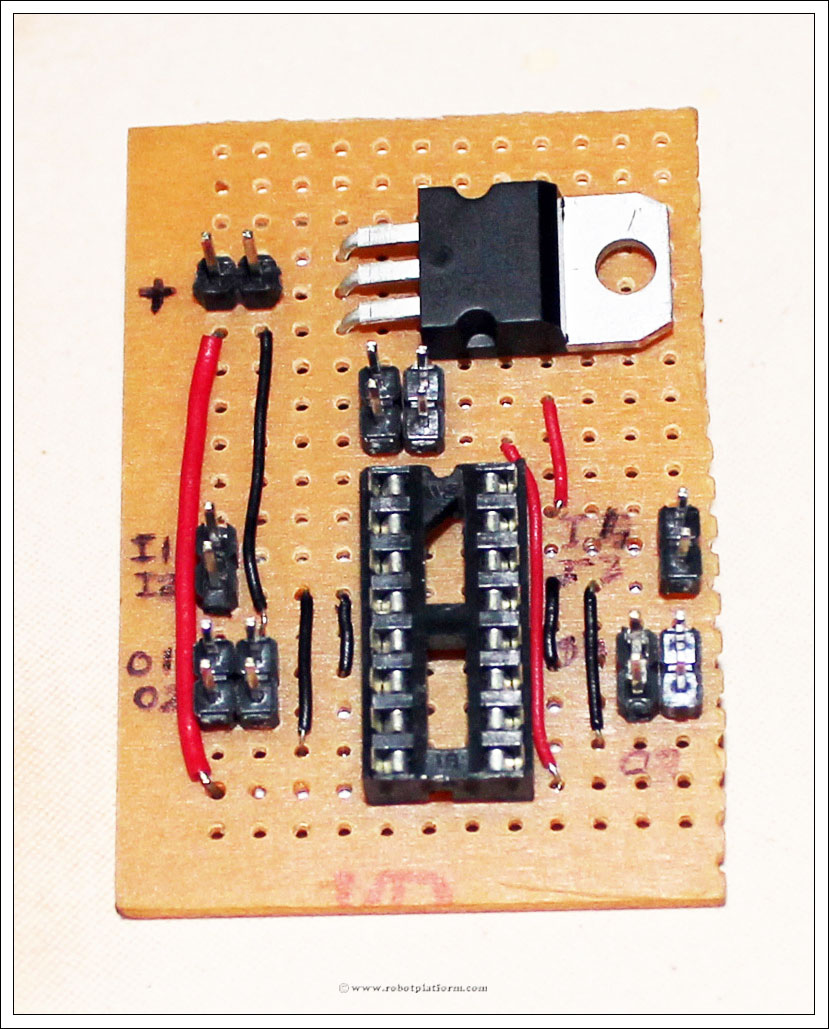
DONE!! You have a completed (and hopefully working) L293D motor driver board which can control two motors.
As you can see in the image, I have drilled four holes (actually five including one below the regulator) and pushed four screws into it.
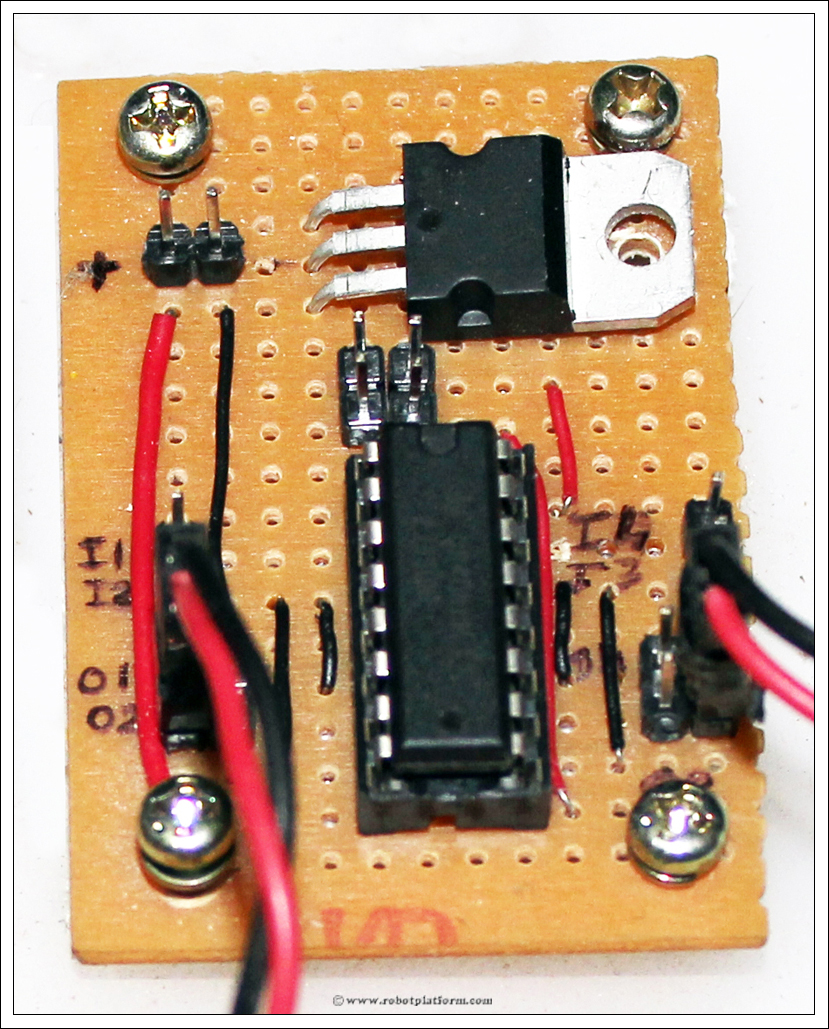
Whenever you implement it, always remember that enable pins are not connected. Either connect enable pins to your microcontroller pins and programmatically set it high, or use a jumper and connect each enable pin to the header just above it (which is connected to +5V)
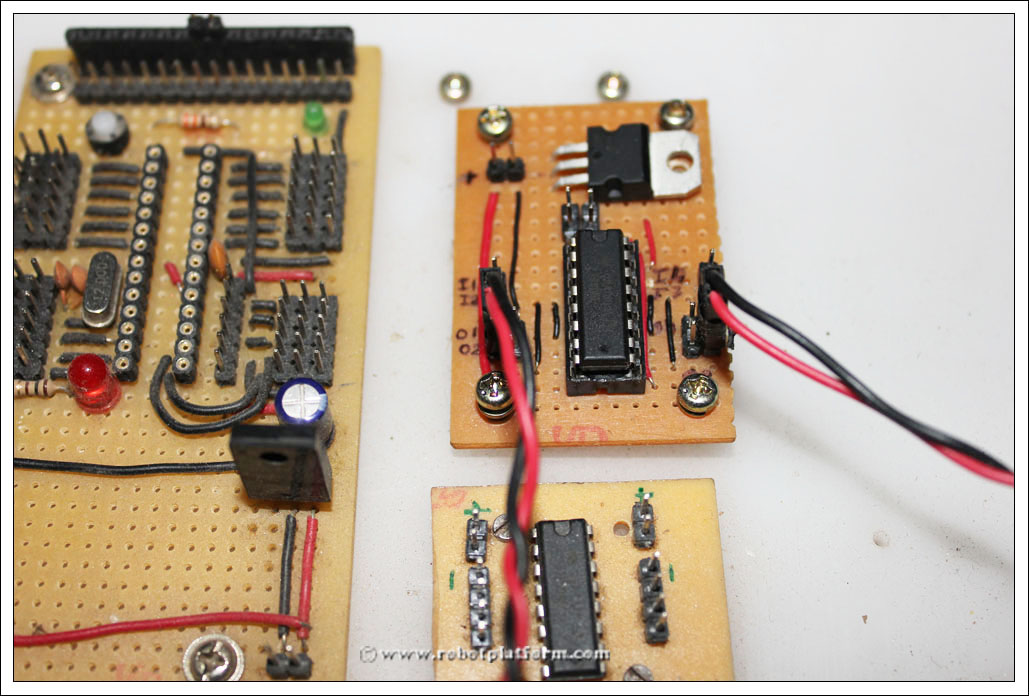
Here is the implementation on one of my robots. You can also see that there is another small board which is also a motor driver, but the board is built using PCB etching method.
Here is the schematic I had developed. If anybody is interested in building a board using PCB Etching method, or any other method, please request in the forum and I will share the complete board designs.